Dérivation et double dérivation
Dérivation
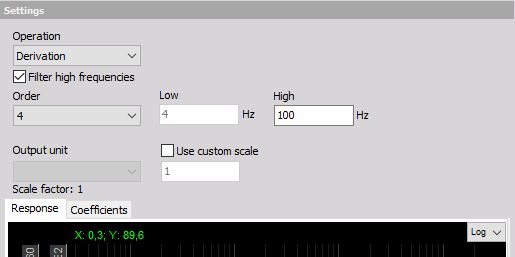
La dérivation et la double dérivation sont utilisées, comme leurs noms l’indiquent, pour calculer la dérivée et la double dérivée de signaux d’entrée. Ici le domaine d’application n’est pas divisé en deux sections puisque la procédure est la même pour tous les cas. Le calcul basique est simple : la soustraction de la valeur actuelle à la valeur précédente divisée par l’intervalle de temps entre les deux.
Cependant, cela produit des signaux très bruités, spécifiquement avec des signaux hautes fréquences. Nous pouvons comparer cela à un filtre de 20dB/décades dans le domaine fréquentiel. Il est donc parfois nécessaire de couper les composantes hautes fréquences. Nous choisissons donc un filtre passe bas d’ordre au moins 2 pour la dérivation et 3 pour la double dérivation.
Prenons comme exemple le calcul de l’accélération en dérivant la vitesse d’un véhicule. Avec une voiture, nous ne pouvons pas avoir une accélération réelle supérieure à 10Hz. Les valeurs plus hautes sont des vibrations.
Nous choisissons donc un filtre passe bas à 10Hz et nous obtiendrons l’accélération réelle du véhicule. La mise à l’échelle se fera de cette manière :
1 km/heure / s = 1000 m / 3600 sec /sec = 0.278 m/s2 = 0.278 / 9,81 g = g 0.0283
Nous devrons entrer cette valeur pour avoir des résultats corrects.