Encodeur
L’encodeur est une roue (ou barre linéaire) avec des marques dessus. Nous avons généralement des encodeurs à deux marques (par exemple, les signaux A et B) avec une différence de phase de 90 degrés. l’un à l’autre pour déterminer la direction du mouvement et une impulsion nulle - une impulsion par tour qui peut nous indiquer la position absolue du codeur (par exemple impulsion 0 °).
- Matériel requis - Dewesoft USB
- Configuration du taux d’échantillonnage - Au moins 1 kHz
Pour de l’aide supplémentaire avec Encodeur configuration visitez Dewesoft formation PRO.
X1, X2, X4 modes
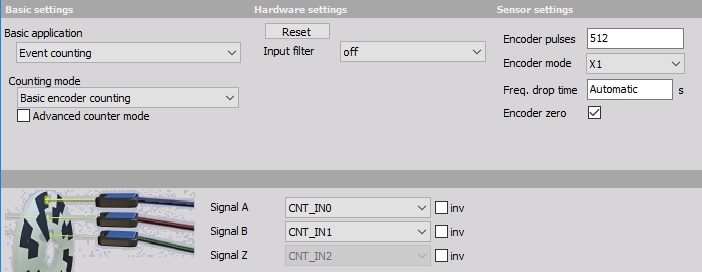
- Nous choisissons le «comptage de l’encodeur de base» comme mode compteur.
- Ensuite, nous choisissons les entrées de signal: signal A et signal B (par exemple CNT \ _IN0 et CNT \ _IN1). Le signal Z (par exemple CNT \ _IN2) est prédéfini par Dewesoft. Les signaux peuvent être sélectionnés dans les listes déroulantes.
- Nous réglons le mode Encodeur sur:
- X1 - pour mesurer uniquement les fronts montants de l’entrée A - la sortie de ce compteur est le compteur qui compte lorsque le signal A conduit le signal B et décroît lorsque le signal B conduit le signal A; les bords positifs du signal A sont utilisés pour effectuer les comptages
- X2 - mesure les fronts montant et descendant de l’entrée A; par conséquent, la résolution sera augmentée d’un facteur 2 (la mise à l’échelle doit également être modifiée)
- X4 - le mode mesure les fronts montants et descendants des signaux des signaux A et B, la résolution des mesures est donc augmentée d’un facteur 4 (la mise à l’échelle doit également être modifiée)
REMARQUE: Les modes X2 et X4 sont extrêmement utiles si nous avons un mouvement lent (par exemple avec des encodeurs linéaires) car cela augmentera en fait la résolution de la mesure d’un facteur deux ou quatre. Si nous avons une mesure dynamique rapide (comme les vibrations de torsion), cela introduira parfois plus d’erreurs si nous utilisons le mode X2 et X4, car ces deux modes supposent que le rapport d’écart est exactement de 0,5 et que l’électronique du codeur commute exactement à la même vitesse entre l’obscurité et les zones claires. Nous pouvons évaluer cette erreur avec : Mesure de période et de largeur d’impulsion.
- Nous avons également réglé le filtre d’entrée pour qu’il corresponde à notre fréquence la plus élevée afin d’éviter les doubles comptes.
Pour plus d’informations sur les Compteurs de voir -> Compteur de paramètres matériels.
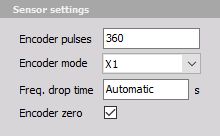
L’impulsion zéro
L’impulsion zéro est utilisée pour réinitialiser une mesure lorsqu’une impulsion Z est reconnue.
La seule modification apportée à la configuration consiste à cocher la case Encoder zero. Cela réinitialisera la valeur du compteur à 0 lorsqu’une impulsion nulle est passée. Nous devons également définir le nombre d’impulsions de l’encodeur pour les calculs internes.