Bruit de freinage
Le plugin de bruit de frein est utilisé pour détecter et suivre le bruit causé par les vibrations mécaniques dans divers systèmes de freinage en utilisant un algorithme basé sur Directive VDA 303 .
La détection du bruit de frein est basée sur la comparaison du son et du spectre d’amplitude des vibrations mécaniques. Les seules entrées nécessaires pour détecter les bruits de freinage sont les mesures du son et des vibrations. Le calcul du spectre d’amplitude avec un algorithme de transformée de Fourier rapide (FFT) est complètement intégré au plugin. Pendant la mesure, le plug-in peut détecter et suivre simultanément plusieurs événements de bruit de frein dans plusieurs paires de détection de vibrations sonores, tandis que les paramètres statistiques de l’événement de bruit ou de tout canal scalaire Dewesoft peuvent être calculés lors d’un événement de bruit de frein réel.
Le plugin de bruit de frein est flexible en ce qui concerne les différentes configurations matérielles. Avec un appariement automatique d’entrées de sons et de vibrations définies dans des paires de détection, la charge de travail de configuration est considérablement réduite pour les grandes configurations de mesure. La quantité de systèmes de freinage mesurés et analysés n’est limitée que par les ressources informatiques disponibles.
Comme avec les modules mathématiques de Dewesoft, le plug-in de bruit de frein peut également être utilisé en mode analyse pour recalculer les données et corriger les erreurs de configuration initiale.
Configuration
Le plugin de bruit de frein peut être configuré par son interface utilisateur dans la configuration du canal. L’interface utilisateur du plugin peut être divisée en quatre parties principales:
En configurant le plugin, vous obtenez des canaux de sortie dans lesquels les résultats sont écrits. La gamme de résultats et comment sont-ils générés à partir de paires de détection a son propre sujet:
Paramètres de transformation de Fourier
Pour détecter le bruit de frein causé par les vibrations, le plugin compare les spectres d’amplitude des mesures de vibrations sonores et mécaniques. La transformation du signal temporel en spectre de fréquence est calculée dans le plugin. Par conséquent, les seules entrées nécessaires pour la détection du bruit de frein sont le signal de pression acoustique dans les pascals et le signal de vibration mécanique qui est généralement mesuré avec un accéléromètre. Le spectre d’amplitude des signaux mesurés est calculé avec l’algorithme de transformée de Fourier rapide (FFT). L’algorithme utilisé est le même que dans d’autres composants Dewesoft qui calculent le spectre de fréquence du signal comme Transformation de Fourier. Les paramètres exposés dans le plugin sont ceux qui sont pertinents pour la détection du bruit de frein. Les paramètres par défaut sont basés sur la directive VDA 303.
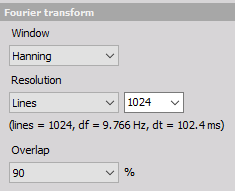
- Fenêtre: vous pouvez sélectionner ici la fenêtre à appliquer au signal avant le calcul du spectre d’amplitude. Vous pouvez sélectionner l’une de ces fenêtres: ** Rectangle, Hanning, Hamming, Flat top, Triangle, Blackman, Blackman-Harris **. Par défaut, la fenêtre Hanning est sélectionnée.
Résolution : ici, vous pouvez sélectionner la quantité d’échantillons qui seront utilisés dans la transformation. Cela détermine le nombre de lignes calculé par la transformation, la résolution de ligne et la durée du signal utilisé pour la transformation. La résolution peut être spécifiée de trois manières différentes:
- Lines: le nombre de lignes du spectre de fréquence calculé,
- Fréquence delta: résolution de fréquence en Hz du spectre calculé,
- Durée: la durée du signal en millisecondes qui est prise en compte dans la transformation.
Dans chaque option, vous pouvez sélectionner l’une des valeurs déjà définies ou saisir la valeur souhaitée. L’étiquette sous les zones de liste déroulante de résolution affiche les valeurs réelles des lignes, la fréquence delta et la durée de la transformation. En cas de fréquence ou de durée delta spécifiée, les valeurs exactes spécifiées ne peuvent généralement pas être atteintes. Ceci est déterminé principalement par le taux d’échantillonnage d’acquisition sélectionné. La FFT réelle qui sera utilisée dans les calculs sera aussi proche que possible de la valeur spécifiée. De plus, en cas de durée ou de fréquence delta, la taille réelle de la FFT et le nombre de lignes changent si le taux d’échantillonnage d’acquisition Dewesoft change. Dans le cas de lignes comme option d’entrée de résolution, la taille de la FFT restera la même si la fréquence d’échantillonnage d’acquisition Dewesoft change. Mais la résolution en termes de fréquence et de durée réelles du delta changera. Le paramètre par défaut de l’option de résolution est des lignes, avec 1024 lignes calculées par la transformation. Avec un taux d’échantillonnage d’acquisition réglé sur 50 kHz, la FFT satisfait à l’exigence de pouvoir détecter les bruits de freinage avec une durée d’au moins 45 ms.
Chevauchement: pour capturer correctement les spectres d’amplitude des événements de bruit doivent être calculés avec un chevauchement. Le pourcentage de chevauchement détermine la quantité d’échantillons les plus récents de la FFT précédemment calculée qui seront également utilisés pour le nouveau calcul de la FFT. Vous pouvez sélectionner 50, 66, 75 ou 90 pour cent de chevauchement. Par défaut, 90 pour cent de chevauchement est sélectionné, cela garantit que le calcul capturera au pire les événements de bruit qui sont aussi longs que la durée du signal utilisé dans le calcul de la FFT.
Pondération sonore
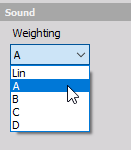
Le spectre d’amplitude sonore est toujours calculé en décibels et pondéré en fréquence en fonction du paramètre de pondération sélectionné. Les pondérations que vous pouvez sélectionner sont: Linéaire (pas de pondération), A, B, C et D. Par défaut, Une pondération est sélectionnée.
Détection de bruit
La détection et le suivi des événements de bruit de frein fonctionnent en comparant le spectre d’amplitude des signaux sonores et vibratoires. Les pics d’amplitude des deux spectres doivent être supérieurs à un seuil spécifié pour chaque canal de son et de vibration seul. Les pics d’amplitude supérieurs au seuil sont ensuite vérifiés dans l’algorithme de détection.
![]()
L’algorithme de détection peut être configuré avec les zones d’édition:
- Fréquence minimale et fréquence maximale: l’algorithme de détection ne comparera que les pics d’amplitude qui se situent dans la plage entre les fréquences minimale et maximale définie ici. Par défaut, la fréquence minimale est définie sur 100 Hz et maximale sur 16000 Hz.
- Écart absolu maximum: cela détermine si deux pics d’amplitude ou plus appartiennent au même événement de bruit ou doivent-ils être traités comme des événements de bruit différents. Par conséquent, si la différence de fréquence des pics est inférieure à l’écart absolu maximum défini ici, l’algorithme menace cela comme un événement de bruit. Dans les statistiques impliquant des calculs de pic d’amplitude, seul le pic avec la valeur maximale est utilisé. Par défaut, l’écart absolu maximum est défini sur 100 Hz.
- Écart relatif maximal: a la même fonctionnalité que l’écart absolu maximal. Cependant, la différence de fréquence entre les pics qui déterminent s’ils appartiennent au même événement de bruit est calculée en pourcentage de la fréquence à laquelle ces pics sont. Par exemple, si l’écart relatif est défini à 10% et qu’il y a un pic à 1000 Hz et un à 1040 Hz, l’écart absolu déterminé à partir de l’écart relatif maximal est calculé comme 1000 Hz * (5% / 100%) = 50 Hz. Étant donné que la différence entre les pics est de 1040 Hz - 1000 Hz = 40 Hz, ce qui est inférieur à 50 Hz, ces deux pics sont traités comme provenant d’un seul événement de bruit. Par défaut, l’écart relatif maximal est défini sur 5%.
- Écart maximal de son et d’accélération: ce paramètre est crucial pour faire correspondre les pics d’amplitude du son et des vibrations. Il détermine si le pic d’amplitude sonore est réellement lié à un pic du spectre d’amplitude de vibration. Si la différence de fréquence entre le pic d’amplitude du son et des vibrations est inférieure à celle définie ici, le pic du son est provoqué par des vibrations mécaniques. Par défaut, l’écart sonore et d’accélération maximal est défini sur 50 Hz.
L’étiquette en bas montre une valeur exacte de écart absolu maximum et écart sonore et d’accélération maximum selon la résolution FFT. Habituellement, les valeurs exactes ne peuvent pas être atteintes. Dans ce cas, les écarts sont arrondis à l’écart le plus proche possible. Cela est également vrai lorsqu’un écart absolu est calculé à partir du paramètre écart relatif maximal. Cela garantit que les paramètres sont toujours respectés.
L’état de détection du plugin peut être observé en cochant la case État de suivi:
![]()
Statut de suivi
Une fois activé, le plugin produira un canal supplémentaire appelé état de suivi. Une zone d’édition supplémentaire pour le statut de suivi Heure de publication apparaîtra également. Le canal affichera une valeur de Pas de suivi (valeur: 0) ou Suivi (valeur: 1). La valeur Pas de suivi sera sortie si le plug-in n’a détecté aucun événement de bruit de frein dans aucune paire de détection pendant au moins le temps spécifié dans la zone d’édition post-temps. Sinon, la valeur dans le canal sera définie sur Tracking. L’objectif principal de ce canal est l’utilisation avec enregistrement déclenché lorsqu’un bruit de frein est détecté. L’heure de suivi de l’état du suivi est utilisée pour ignorer les petites lacunes dans le suivi lorsque l’événement de bruit s’estompe. Lorsque vous utilisez l’état de suivi comme déclencheur de stockage, il est également important de stocker suffisamment de données pour un éventuel recalcul en mode analyse. Par conséquent, vous devez définir suffisamment Enregistrement pré trigger pour s’adapter à la durée de la FFT. Il est important de savoir que le suivi du temps de publication du statut n’a aucun rapport avec Enregistrement post trigger.
Groupes de canaux
Lorsque l’on étudie le bruit provoqué par des vibrations mécaniques, la détection est basée sur des paires de détection composées d’un son et d’une mesure de vibration. Il s’agit d’une entrée pour l’algorithme de détection et de suivi. Pour étudier le type de bruit et ses causes, le plugin propose également des calculs statistiques qui sont calculés pour la durée de chaque événement de bruit. Parce que différents événements sonores peuvent se produire en même temps: la détection simultanée, le suivi et les calculs statistiques sont entièrement pris en charge. Avec plusieurs mesures du son et des vibrations, la définition de toutes les paires et des statistiques associées prendrait beaucoup de temps et serait sujette aux erreurs. L’objectif de la définition des canaux de détection et des statistiques dans les groupes de canaux est de réduire la charge de travail. Cela se fait en générant automatiquement les paires de détection avec des calculs statistiques.
Lors de la mesure du bruit de frein, il existe généralement des canaux pertinents pour l’ensemble du véhicule (microphone de la cabine, vitesse du véhicule, température de l’environnement …) et des canaux qui ne sont liés qu’à un système de freinage spécifique (vibration des plaquettes de frein, température du disque, pression de freinage). ..). Le canal d’entrée et les définitions statistiques sont séparés en un groupe global et plusieurs groupes locaux. Dans l’interface utilisateur, chaque groupe de canaux possède son propre onglet. Le premier onglet est toujours réservé au groupe global et ne peut pas être supprimé.
Groupe global
Dans le groupe global, vous pouvez définir les entrées de signaux sonores et les statistiques de canal qui sont pertinentes pour une enquête sur les événements de bruit sur tous les systèmes de freinage mesurés.
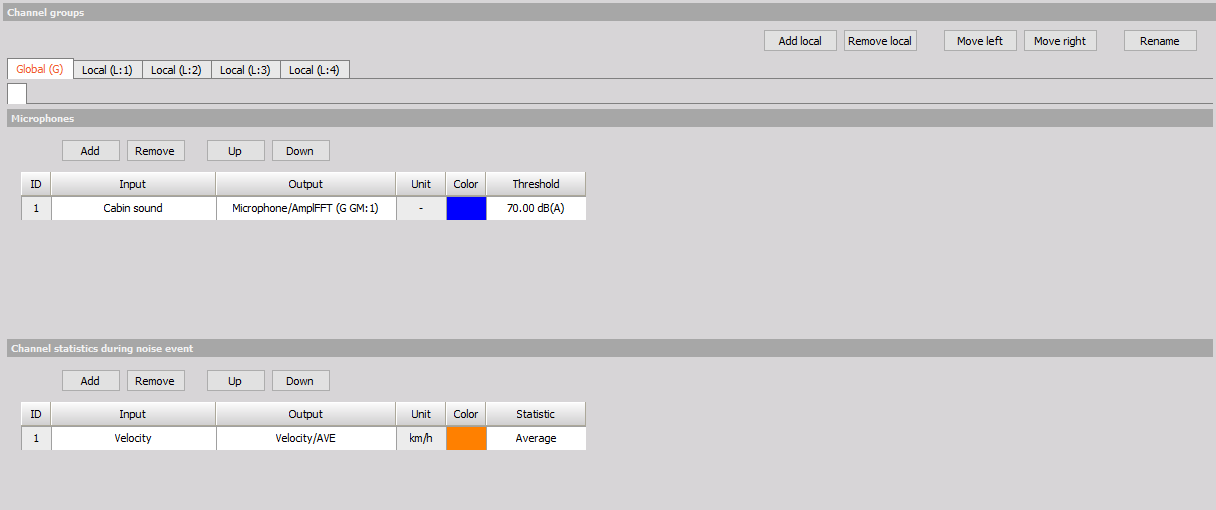
Dans l’image ci-dessus, vous pouvez voir l’interface utilisateur du groupe de canaux global. Il est séparé en deux parties:
- Microphones: contient une grille d’entrée pour les microphones globaux. Ici, vous pouvez définir les canaux d’entrée du son qui seront utilisés pour étudier les événements de bruit sur tous les groupes locaux. Habituellement, les signaux des microphones de cabine sont entrés ici. Pour chaque microphone, vous pouvez définir le seuil en décibels. Seules les amplitudes sonores supérieures à ce seuil seront considérées comme des événements de bruit de frein dans l’algorithme de détection. Il est important de savoir que les signaux de mesure de pression acoustique sélectionnés dans la grille doivent être mesurés en pascals. Seuls les canaux synchrones sans diviseur de fréquence d’échantillonnage sont pris en charge.
- Statistiques de canal pendant le crissement: ici, vous pouvez définir le calcul statistique qui va être calculé pendant tout événement de bruit de frein détecté dans n’importe quelle paire de détection. Vous pouvez sélectionner n’importe quel canal scalaire Dewesoft comme entrée. Les calculs statistiques disponibles sont: Moyenne, Minimum, Maximum et Delta.
Groupe local
Ici, vous pouvez définir les vibrations, les mesures sonores et les statistiques liées à l’ensemble de freinage spécifique. Le nombre de groupes locaux est variable, vous pouvez ajouter, supprimer ou réorganiser leur ordre. Cela peut être fait avec les quatre boutons en haut à gauche de l’interface utilisateur du groupe de canaux:

Par défaut, quatre groupes locaux sont déjà ajoutés dans le plugin (un pour chaque assemblage de frein de roue). Les paramètres d’un groupe local sont divisés par deux onglets:
Accéléromètres et microphones
Dans cet onglet, vous pouvez définir les entrées qui mesurent la vibration des composants et des microphones qui seront utilisés pour détecter les événements de bruit uniquement avec les entrées de vibration de ce groupe.
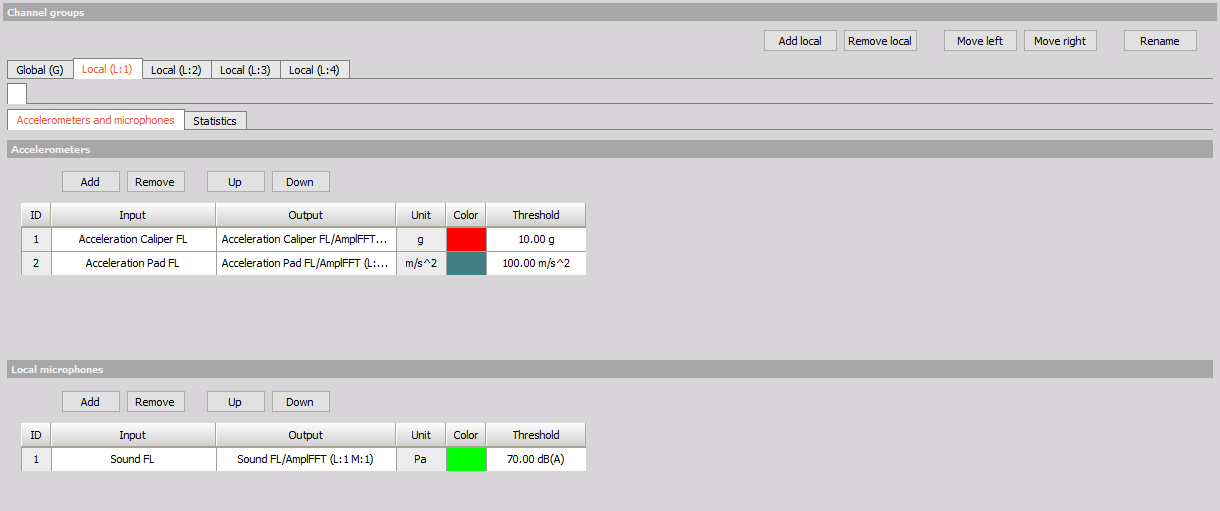
- Accéléromètres: vous pouvez définir ici les canaux de mesure des vibrations utilisés pour la détection du bruit de frein. Habituellement, les vibrations sont mesurées avec un accéléromètre, mais d’autres capteurs avec une bande passante suffisamment élevée peuvent être utilisés. Pour chaque entrée, vous pouvez définir un seuil. Seules les amplitudes supérieures à ce seuil vont être considérées comme des vibrations suffisamment élevées qui pourraient provoquer le bruit. L’unité du signal d’entrée n’est pas importante, le seuil est toujours défini dans la même unité que le signal d’entrée. Seuls les canaux synchrones sans diviseur de fréquence d’échantillonnage sont pris en charge en entrée.
- Microphones: similaire à la grille d’entrée du microphone dans le groupe global, vous pouvez définir ici les canaux d’entrée du son. La différence est que ceux-ci ne seront utilisés que pour détecter le bruit avec des entrées de vibration du même groupe local. Pour chaque microphone, vous pouvez définir le seuil en décibels. Seules les amplitudes sonores supérieures à ce seuil seront considérées comme des événements de bruit de frein dans l’algorithme de détection. Il est important de savoir que les signaux de mesure de pression acoustique sélectionnés dans la grille doivent être mesurés en pascals. Seuls les canaux synchrones sans diviseur de fréquence d’échantillonnage sont pris en charge en entrée.
Statistiques
Dans l’onglet Statistiques, vous pouvez sélectionner les statistiques d’événements de bruit que vous souhaitez calculer et ajouter une statistique de canal qui ne sera calculée que dans les paires de détection de ce groupe.
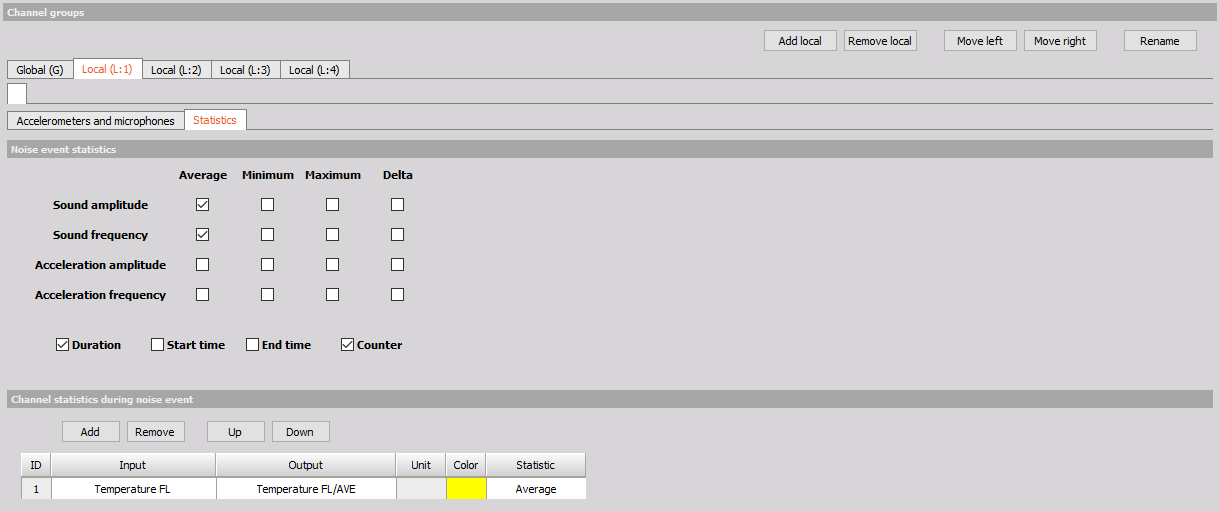
Statistiques d’événement de bruit: ici, vous pouvez choisir diverses statistiques de l’événement de bruit de frein à calculer. Dans le tableau supérieur des cases à cocher, vous pouvez activer le calcul de: Moyenne, Minimum, Maximum et Delta valeurs de Amplitude sonore, Fréquence sonore, Amplitude d’accélération et Fréquence d’accélération. En dernière ligne, vous pouvez activer la sortie de l’événement de bruit Durée, Heure de début, Heure de fin et Compteur. Le compteur produira le nombre consécutif d’événements de bruit de frein détectés sur une paire de détection spécifique.
Statistiques de canal: ici, vous pouvez définir le calcul statistique qui va être calculé pendant tout événement de bruit de frein détecté dans la paire de détection définie par le groupe local. Vous pouvez sélectionner n’importe quel canal scalaire Dewesoft comme entrée. Les calculs statistiques disponibles sont: Moyenne, Minimum, Maximum et Delta.
Sorties
Les résultats des calculs du plugin sont écrits dans les sorties. Il existe trois types de sorties différents:
- Spectres d’amplitude: le résultat du calcul du spectre d’amplitude de chaque microphone et accéléromètre est écrit dans un canal de réseau asynchrone,
- Sorties statistiques: les calculs statistiques sur chaque paire de détection microphone-accéléromètre auront leurs propres sorties. Dans ce document, les résultats des calculs statistiques seront écrits chaque fois que l’événement de bruit sera terminé. Le résultat statistique est toujours émis dans un canal scalaire asynchrone.
- État de suivi: un seul état de suivi peut être généré par le plugin. Il affiche l’état de l’algorithme de suivi en fonction de État de suivi.
Étant donné que l’état de suivi est simple et ne nécessite qu’un seul paramètre pour être activé ici, nous allons nous concentrer sur Spectre d’amplitude et Sorties statistiques et comment sont-ils liés à la configuration. Dans l’image suivante, nous avons un exemple de configuration avec deux groupes locaux.
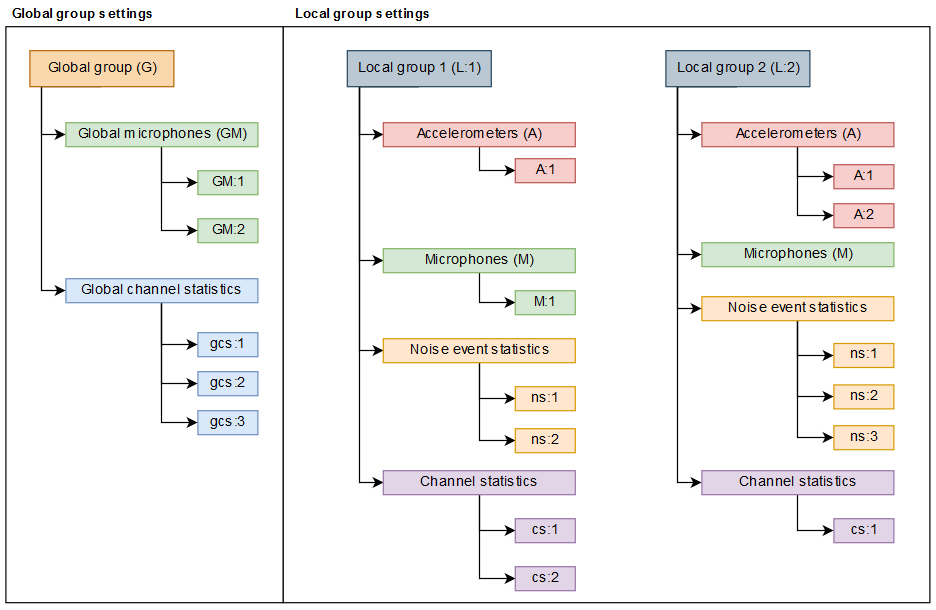
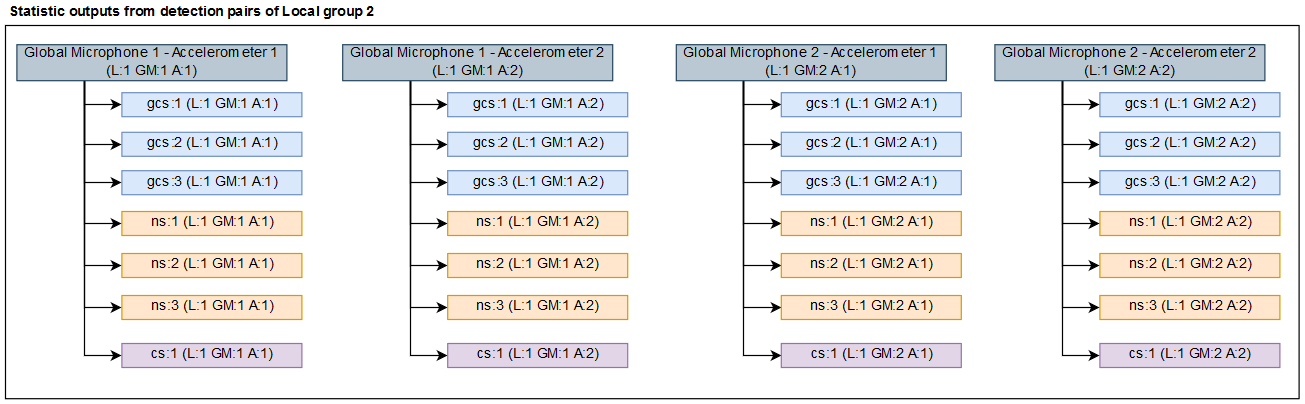
Dans le groupe global, il y a deux microphones globaux (GM: 1, GM: 2) et trois statistiques de canaux globales (gcs: 1, gcs: 2, gcs: 3). Dans le groupe local 1, il y a un accéléromètre (A: 1) et un microphone local (M: 1), deux statistiques d’événement de bruit (ns: 1, ns: 2) et deux statistiques de canal (cs: 1, cs: 2). Dans le groupe local 2, il y a deux accéléromètres (A: 1, A: 2), pas de microphones locaux, trois statistiques de crissement (ns: 1, ns: 2, ns: 3) et une statistique de canal (cs: 1).
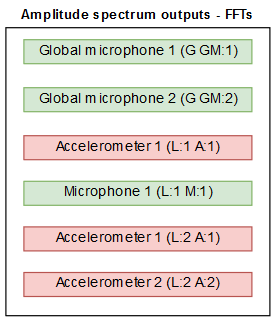
À partir de chaque microphone et accéléromètre, une sortie de spectre d’amplitude est générée.
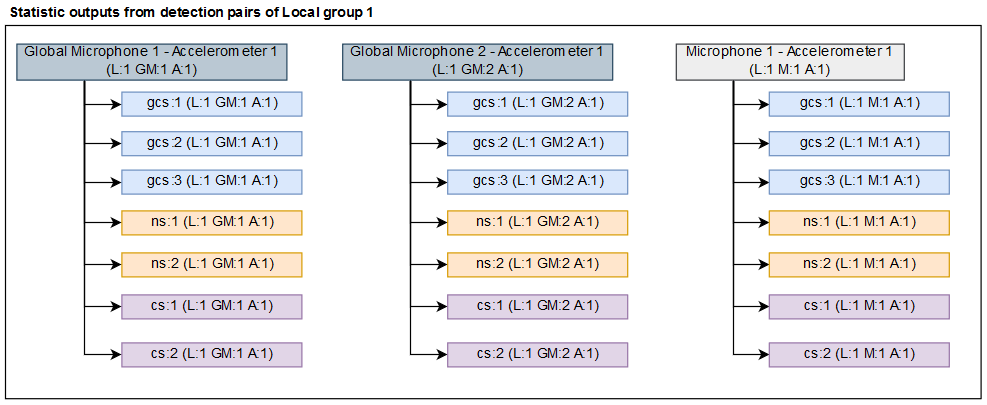
Chaque accéléromètre forme des paires de détection avec des microphones globaux et locaux définis dans le même groupe que l’accéléromètre. Chaque paire de détection d’un accéléromètre de groupe local a des calculs statistiques qui sont composés de: statistiques de canal global, statistique de crissement local et statistique de canal local. Chaque calcul statistique a sa propre sortie. Dans la configuration présentée, il y a sept paires de détection. Dans le groupe local 1, l’accéléromètre (A: 1) forme des paires de détection avec deux microphones globaux (GM: 1, GM: 2) et un microphone local (M: 1). Dans chaque paire de détection, trois statistiques globales de canal (gcs: 1, gcs: 2, gcs: 3), deux statistiques d’événement de bruit (ns: 1, ns: 2) et deux statistiques de canal (cs: 1, cs: 2) sont calculées .
Dans le groupe local 1, les accéléromètres (A: 1, A: 2) forment des paires de détection avec deux microphones globaux (GM: 1, GM: 2). Dans chaque paire de détection, trois statistiques globales de canal (gcs: 1, gcs: 2, gcs: 3), trois statistiques d’événement de bruit (ns: 1, ns: 2, ns: 3) et une statistique de canal (cs: 1) sont calculées .
Numérotation
Les numérotations des sorties sont automatiquement ajoutées aux sorties. Toutes les numérotations sont liées à la position du groupe, du microphone et de l’accéléromètre dans l’interface utilisateur. La numérotation et la dénomination automatiques s’arrêteront si le nom de sortie est modifié manuellement en une valeur différente de la valeur attribuée automatiquement. Les abréviations des microphones et accéléromètres sont fixes: GM pour les microphones globaux, M pour les microphones locaux et A pour les accéléromètres. Les abréviations des groupes peuvent être modifiées. Cela se fait dans la boîte de dialogue Renommer qui s’ouvre pour le groupe de canaux sélectionné lorsque vous appuyez sur le bouton Renommer dans le [Groupe de canaux]{#Channelgroup} interface utilisateur. Dans selection des voies les sorties sont organisées en fonction des groupes de canaux et des paires de détection auxquelles ils appartiennent.
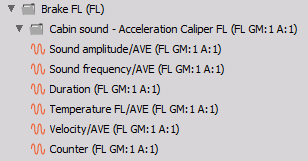
Dans l’image ci-dessus, nous pouvons voir les sorties statistiques d’une paire provenant d’un groupe local nommé Brake FL avec une abréviation FL. La paire est formée entre un canal microphone mondial Son cabine et un canal accéléromètre Accélération FL.