Régulation PID
Dewesoft peut être utilisé comme un régulateur PID à l’aide de la régulation PID.
AVERTISSEMENT: Le logiciel Dewesoft fonctionnant sous Windows n’est pas un système en temps réel car Windows n’est pas un système d’exploitation en temps réel. Cela signifie que le retard du contrôleur n’est pas toujours le même et peut être imprévisible. Par exemple, Windows pourrait donner la priorité à une autre application au lieu de Dewesoft, ce qui peut augmenter considérablement le délai du contrôleur.
Lorsque vous appuyez sur le bouton Config. sur la ligne de contrôle PID nouvellement activée, la fenêtre d’écran de configuration suivante s’ouvre:
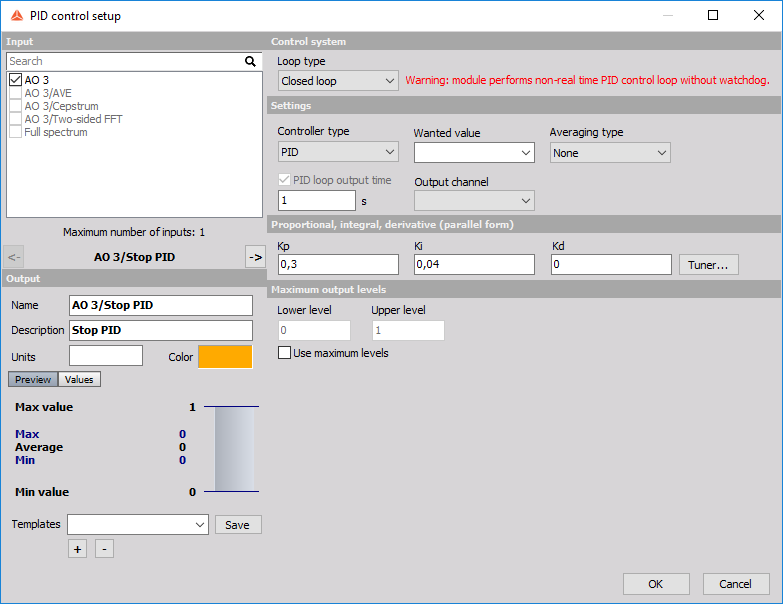
Systèmes de contrôle
Type de la boucle - si la boucle ouverte est choisie, il n’y a aucun retour au contrôleur. En mode mesure, l’utilisateur peut définir une valeur pour la voie de contrôle (sortie analogique ou numérique, par exemple) et mesurer la réponse sans interférence du contrôleur. Cette option est utile pour obtenir la réponse échelonnée du système. Si la boucle fermée est choisi, la boucle de rétroaction est activée et des paramètres supplémentaires apparaissent.
Paramètres
- Type de contrôleur - nous pouvons choisir entre un contrôleur PID et un contrôleur PI avec anti-windup (anti-windup sera décrit plus loin dans ce tutoriel). Si seul le contrôleur P est nécessaire, le type PID peut être choisi et des zéros remplis pour les gains I et D.
- Valeur désirée -le point de consigne. Dans la figure ci-dessus, nous avons créé un canal d’entrée utilisateur (sous Configuration des canaux, Entrées utilisateur) appelé «Fréquence de consigne» afin de pouvoir modifier la consigne pendant la mesure.
- Voie de sortie - la sortie du contrôleur. Normalement, une voie de sortie analogique ou numérique sera choisie. Dans la figure ci-dessus, nous avons nommé la voie de sortie analogique comme «Contrôle de la tension AO».
- Temps de sortie de la boucle la période à laquelle le contrôleur mettra à jour la voie de sortie.
- Type de moyennagela méthode de calcul de la moyenne de l’erreur (erreur = valeur souhaitée - entrée). Peut être utilisé s’il y a beaucoup de bruit dans la valeur du processus.
Niveaux de sortie max
Les niveaux de sortie maximum définissent les niveaux minimum et maximum de la voie de sortie et peuvent être définis si vous le souhaitez.
Integrator windup limit
La limite de windup de l’intégrateur est visible lorsque le type de contrôleur est réglé sur PI avec anti-windup et fixe les limites de la voie de sortie dans ses unités. Lorsque la voie de sortie est en dehors de ces limites, l’erreur ne sera pas intégrée. Il existe un autre moyen de vaincre un temps mort important. Dans la configuration PID, nous pouvons choisir le type de contrôleur PI. Cela empêchera l’accumulation de l’erreur d’intégration lorsque l’actionneur est en saturation, ce qui se produit pendant le temps mort. Si ce type de contrôleur est choisi, la méthode Ziegler-Nichols fournit une très bonne réponse même dans le cas d’un temps mort important.
Pour obtenir de l’aide supplémentaire sur le contrôle PID, consultez la formation Dewesoft PRO ->Dewesoft page Web ->Formation PRO -> ContrôlePID.