Modes de fonctionnement
Dans l’onglet Géné. function, plusieurs modes de fonctionnement peuvent être choisis :
- Mode Gén. fonction
- Réglage de la fréquence [Hz]

- Réglage des temps de montée et descente [sec]

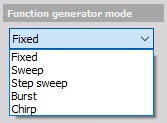
Le générateur de fonction offre cinq modes de fonctionnement différents, qui sont communs à toutes les voies de sortie analogiques :
-> |
Signaux avec une fréquence constante |
|
-> |
Balayage en fréquence entre Fréq de départ et Fréq de fin |
|
-> |
Balayage en fréquence par pas de fréquences fixes |
|
-> |
Rafales aléatoires |
|
-> |
Balayage en fréquence rapide et répété après un laps de temps défini |
L’amplitude du signal ne passe pas instantanément de zéro à l’amplitude maximale, la durée de transition est préalablement définie. Cela diminue le risque de sauts et de variations brusques d’amplitude sur le signal généré, ce qui est important pour éviter des chocs sur la structure en test.
Fréquence fixe
Ce mode assigne une Fréquence (f1) aux voies sélectionnées. Cette fréquence est la même pour toutes les voies, elle est définie au niveau du réglage Param. fréq. (Hz).
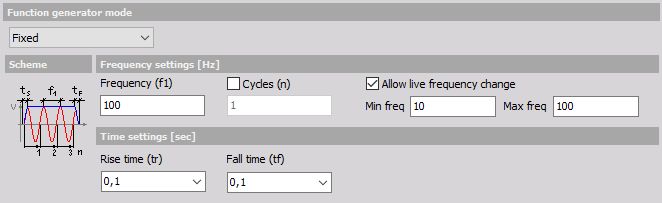
Il est également possible de définir un certain nombre de cycles, pour cela il faut cocher la case Cycles (n) et définir le nombre de cycles, sinon, la sortie est continue.
La fréquence de sortie est la même pour toutes les voies sélectionnées. Si la case Autoriser chgmt fréq en direct est cochée, il est possible de faire varier la fréquence pendant les essais dans la gamme de fréquence sélectionnée (Fréq min - Fréq max).
| Pour éviter les sauts sur le signal, des durées de transition peuvent être réglées à partir de la sélection du menu déroulant au niveau du Tps de montée (tr) et du Tps de descente (tf). |   |
| Applications: | le mode Fréquence fixe est utilisé dans le cas où le signal de sortie ne doit pas varier automatiquement en fréquence et en amplitude. Un tel générateur de fonction est utile lors de tests en laboratoire sur des circuits électroniques, des amplificateurs de puissance, et des filtres et autres composants. De plus, ce mode de fonctionnement fournit une excellente base pour les procédures d’étalonnage. Plusieurs voies permettent de tester des retards et des erreurs de phase. |
Balayage
Un balayage est définie par une Fréq de départ (f1), une Fréq de fin (f2), et une Durée de balayage (t1).
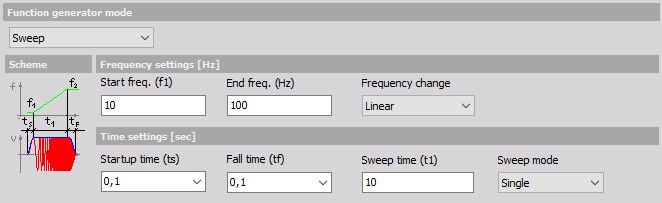
Tps de départ (ts) et Tps de descente (tf) définissent la pente au début et en fin de balayage.
| De plus, l’évolution en fréquence peut être linéaire ou logarithmique, et dans ce cas elle permet de fournir plus de cycles en basse fréquence, ces modes d’évolution peuvent être sélectionnés à partir du menu déroulant. |  |
| Deux modes de Balayage sont sélectionnables à partir du menu déroulante Boucle et Simple. En mode Simple, vous obtiendrez un seul balayage (de Fréq de départ à Fréq de fin), au mode Boucle le balayage est continu. |  |
| Applications: | Les balayages sont utiles pour tester les circuits électroniques, tels que les filtres mais aussi dans certains tests d’analyse modale. |
Balayage pas à pas
Le balayage pas à pas est une méthode d’excitation spécifique pour certains essais d’analyse modale. Le signal reste à certaines fréquences fixes ce qui permet à la structure testée d’avoir une excitation stabilisée. Les réponses de la structure (FRF) sont d’autant mieux mesurées que le pas en fréquence du balayage est petit. Cet type d’essai est très lent mais il permet d’obtenir des résultats très précis.
Cette voie peut servir de trigger quand ce type d’excitation est utilisé pour des tests d’analyse modale.
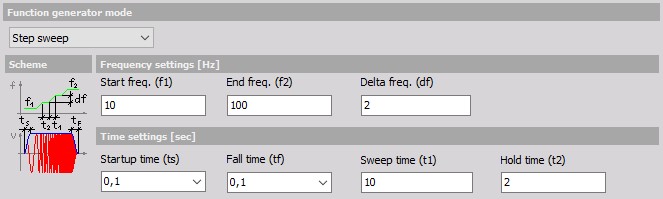
Fréq de départ (f1) et Fréq de fin (f2) ont les mêmes fonctions que pour le mode Balayage. Delta freq.(df) définit le pas du balayage.
Durée de balayage (t1) définit la durée allouée pour passer d’une fréquence à la prochaine, Temps de maintien (t2) définit la durée pendant laquelle la fréquence est constante.
Tps de départ (ts) et Tps de descente (tf) définissent la pente au début et en fin de balayage.
| Applications: | ce mode est principalement utilisé pour des essais d’analyse modale. |
Rafale
En mode rafale, le Tps de départ (ts), le Tps de descente (tf) et le Tps de repos (t1) peuvent être définis. Dans ce type d’excitation, Rafale, le signal le plus communément utilisé est un signal de type aléatoire.
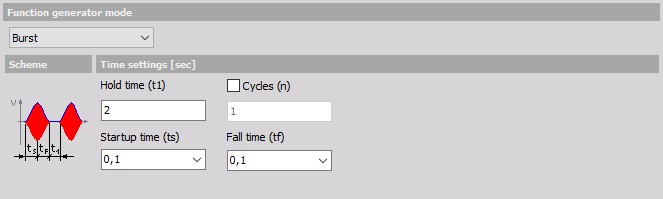
Le signal est généré entre le Tps de départ (ts) et le Tps de descente (tf).
En cochanct la case Cycles (n), il est possible de définir un nombre n de rafales.
| Applications: | Le mode Rafale aléatoire permet une amélioation (par rapport à une excotation de type aléatoire) pour les mesures de fonctions de transfert.Il n’y a pas forcément besoin d’utiliser des fenêtres de pondération temporelle, et donc les erreurs causées par fenêtrage sont éliminées. Ce type de signal est utile pour caractériser des réponses des systèmes. |
Chirp
Le mode Chirp est similaire un mode balayage mais avec une durée de balayage très courte. Le balayage rapide peut être répété après un certain temps.
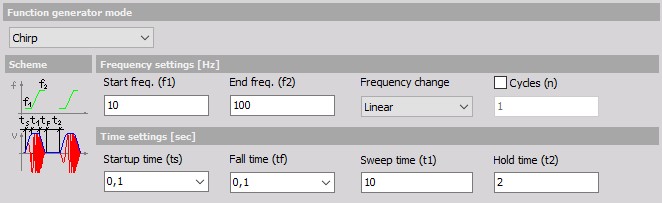
La plage de fréquence à balayer est définie entre Fréq de départ (f1) et Fréq de fin (f2). Le changement de Fréquence peut être linéaire ou logarithmique. Il est possible de définir le nombre de balayages Cycles (n).
Le paramètrage de ce type d’excitation est à faire pour le Tps de départ (ts), le Tps de descente (tf), la Durée de balayage (t1) et la Durée de maintien (t2) (c’est le temps qui sépare 2 Chirp).
Une excitation de type Chirp est similaire à une excitation de type Rafale aléatoire (le sinus remplace l’aléatoire). La plage de fréquence est cependant mieux définie dans le cas d’une excitation type Chirp.
| Applications: | L’excitation type Chirp est utilisée pour l’analyse spectrale des systèmes non linéaires. |