Reference Point
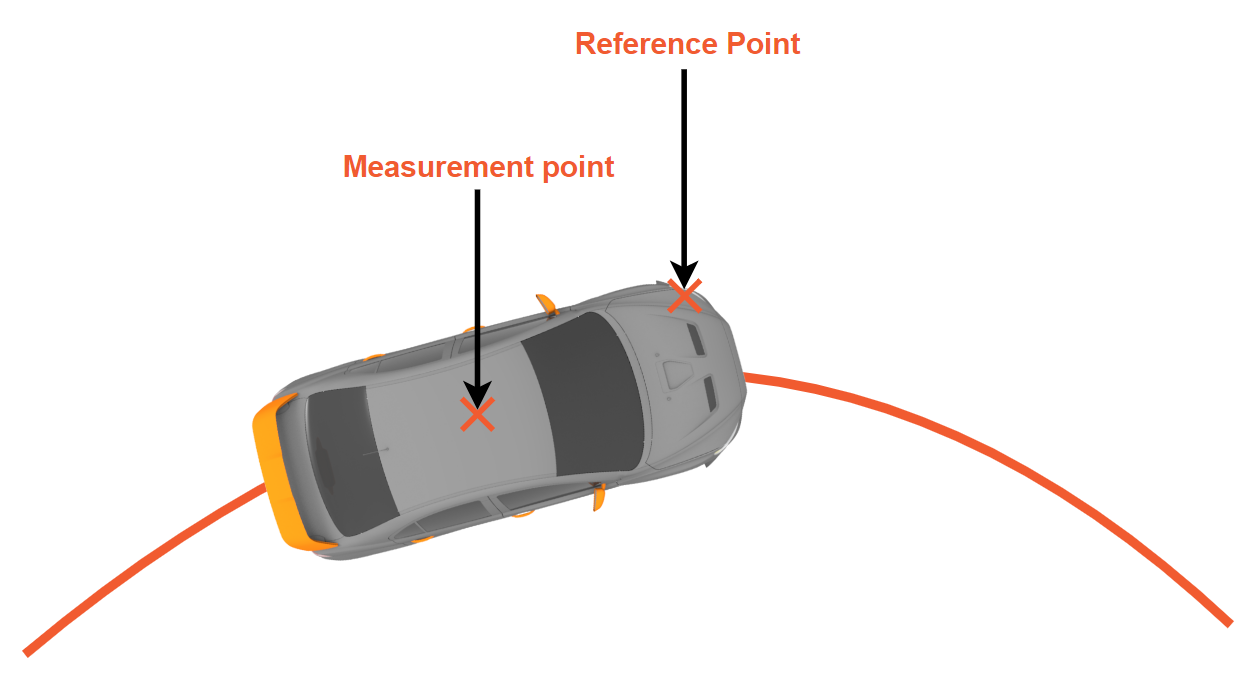
The reference point processing plugin calculates position, velocity and acceleration of a point that is offset from an initial point of measurement.
Inputs
- Navigation channel
- Velocity (X, Y, Z)
- Angular Velocity (X, Y, Z)
- Acceleration (X, Y, Z)
The navigation channel consists of geodetic position (latitude, longitude, altitude) and orientation (roll, pitch, yaw).
Outputs
- Navigation
- Position (X, Y, Z)
- Velocity (X, Y, Z)
- Acceleration (X, Y, Z)
Usage
- After adding the plugin into dewesoft we simply click the + button to add an offset.
We can then change the offset as we like.
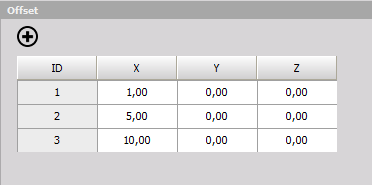
In this current setup we have 3 reference points. For example the first reference point is located 1 meter in front of the actual measurement point.