Intégration & double intégration
L’intégration
Il existe deux principaux objectifs dans une intégration : le premier étant d’obtenir la distance parcourue en partant d’une vitesse mesurée et le second est d’obtenir l’énergie en partant d’une puissance mesurée. Ou sinon on peut aussi essayer d’obtenir une vitesse vibratoire en partant d’une accélération mesurée.
La différence majeure entre ces deux fonctions basiques est que dans la première application, l’information est contenue dans la composante continue (distance parcourue ou énergie dépensée). Dans l’autre application, la composante continue (offset) n’est qu’une erreur de mesure et donc l’information est contenue dans la composante dynamique du signal (vitesse vibratoire dans notre exemple).
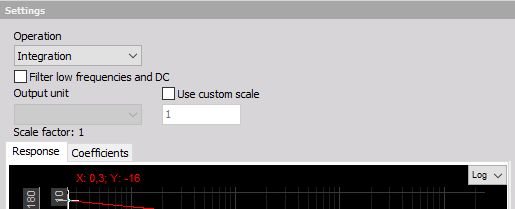
1. Jetons tout d’abord un oeil sur comment intégrer la vitesse pour obtenir une distance. Si nous avons par exemple la vitesse en km/h en voie d’entrée, nous choisissons un filtre, sélectionnons “intégration” et désactivons l’option “Filtrer fréquences basses et composante continue”. La seule chose restante à faire est de définir une échelle. Il faut garder en mémoire qu’une intégration ajoutera une unité supplémentaire au résultat.
EXEMPLE : Si la vitesse est en km/h nous aurons comme résultat : km/h * sec = 1000 m / 3600 sec * sec = 0.278 m.
Si nous voulons donc le résultat en mètres, il nous faudra entrer 0.278 en facteur d’échelle. Si nous voulons le résultat en km, le facteur d’échelle est alors 0.000278.
2. Entraînons nous sur un second exemple. Si nous avons en entrée une puissance en kW, nous aurons en sortie :
EXEMPLE : kW * sec=kW * 1/3600 * h=0.000278 kWh - qui est notre facteur d’échelle.
La seconde application consiste à utiliser l’intégration sur des signaux dynamiques comme l’accélération vibratoire. Si nous avons mesuré une accélération, il y aura toujours un offset provenant des offsets des amplificateurs et du convertisseur analogique/numérique. Cet offset entrainera une dérive des résultats, ce que nous ne voulons pas. Il nous faudra donc utiliser l’option « Filtrer les fréquences basses et composante continue » pour se débarrasser de cet offset.
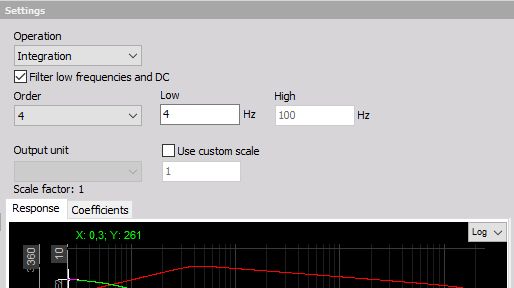
Puis il nous faudra définir l’ordre du filtre. Sachez que l’intégration est équivalente à un filtre d’ordre 1, donc il nous faut utiliser un filtre passe haut avec un ordre d’au moins 2 ou plus pour supprimer la composante continue du signal. La fréquence basse définit à quelle fréquence la composante continue sera coupée. Choisir une valeur « haute » comme 10Hz permettra une stabilisation rapide mais en contrepartie, cela pourrait complètement couper l’information que nous recherchons. Choisir une valeur basse comme 1Hz donnera une stabilisation lente (environ 5 à 10s pour un filtre à 1Hz) mais permettra d’obtenir le résultat en fonction de quasiment toute la bande passante.
Pour les mesures de vibration, la valeur usuelle est de 3 à 10Hz. Pour les vibrations basses fréquences comme sur le corps humain ou les vibrations d’un bâtiment, on choisit plutôt entre 0.3 & 1Hz. Pour des applications plus spécifiques comme le mouvement des vagues ou les grandes structures (comme les antennes relai ou les grues) le mouvement est beaucoup plus lent et d’une fréquence d’environ 0.1 / 0.3Hz. Dans ce cas, la stabilisation sera beaucoup plus longue et nous devons aussi nous assurer que les capteurs utilisés pourront mesurer dans cette gamme de fréquence. Les capteurs ICP basiques ont une fréquence de coupure entre 0.3 et 1Hz et ne sont donc pas utilisés dans ce genre d’application.
La mise à l’échelle pour cette application si nous mesurons notre accélération en g et que nous voulions un résultat en mm/s, serait alors :
1 g * s = 9,81 m/s/s * s = 9,81 m/s = 9810 mm /s
Donc nous aurons à entrer 9810 dans le champ de mise à l’échelle.
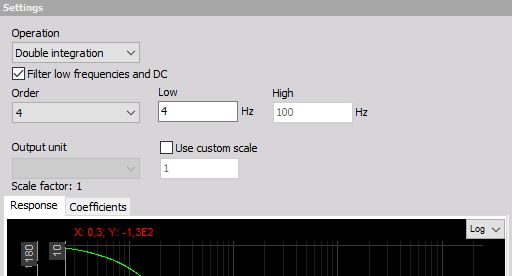
Double intégration
La double intégration est utile notamment pour directement obtenir le déplacement en partant d’une accélération. Notre unité résultante sera multipliée par s \ * s. Nous devrons donc encore choisir l’option « filtrer fréquence basse et composante continue » et tenir compte du fait que la double intégration étant équivalente à un filtre d’ordre 2, il faudra choisir un filtre d’ordre 3 minimum.
La mise à l’échelle maintenant. Généralement, on veut notre résultat en µm. Le facteur d’échelle est donc :
1 g * s * s = 9,81 m/s/s * s * s = 9,81 m = 9,81E6 µm