Intégration & double intégration
L’intégration
Il existe deux principaux objectifs dans une intégration : le premier étant d’obtenir la distance parcourue en partant d’une vitesse mesurée et le second est d’obtenir l’énergie en partant d’une puissance mesurée. Ou sinon on peut aussi essayer d’obtenir une vitesse vibratoire en partant d’une accélération mesurée.
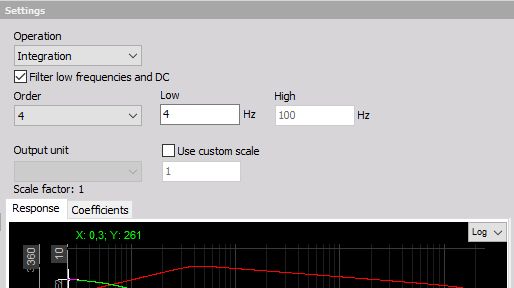
La différence majeure entre ces deux fonctions basiques est que dans la première application, l’information est contenue dans la composante continue (distance parcourue ou énergie dépensée). Dans l’autre application, la composante continue (offset) n’est qu’une erreur de mesure et donc l’information est contenue dans la composante dynamique du signal (vitesse vibratoire dans notre exemple).
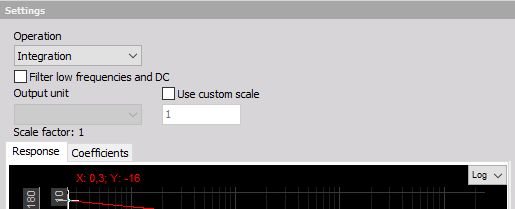
1. Jetons tout d’abord un oeil sur comment intégrer la vitesse pour obtenir une distance. Si nous avons par exemple la vitesse en km/h en voie d’entrée, nous choisissons un filtre, sélectionnons “intégration” et désactivons l’option “Filtrer fréquences basses et composante continue”. La seule chose restante à faire est de définir une échelle. Il faut garder en mémoire qu’une intégration ajoutera une unité supplémentaire au résultat.
EXEMPLE : Si la vitesse est en km/h nous aurons comme résultat : km/h * sec = 1000 m / 3600 sec * sec = 0.278 m.