Capteurs Compteurs
Dewesoft offre un éditeur de capteurs compteurs qui contient la liste et les propriétés des capteurs compteurs qui peuvent être utilisés dans le module suivi d’ordre, l’analyse de la combustion, et la fonction mathématique capteur angulaire. Vous pouvez y définir des encodeurs, roue dentée, et d’autres capteurs d’angle.
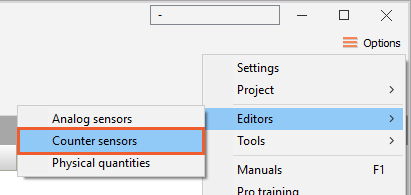
L’éditeur de capteurs Compteurs peut être consulté en cliquant sur Réglages - Editeurs - capteurs compteurs.
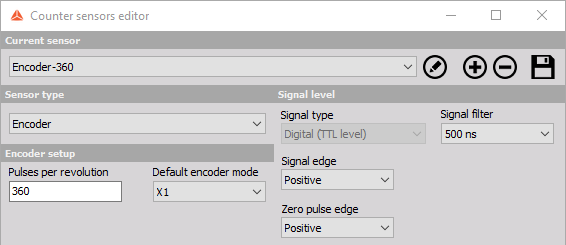
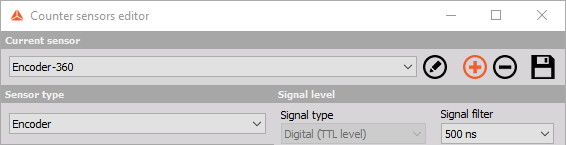
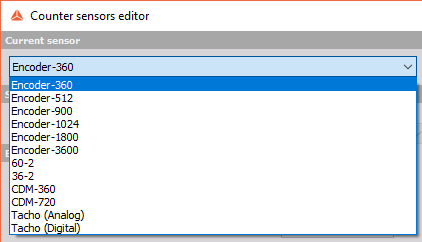
Lorsque vous entrez dans l’interface de l’éditeur, la fenêtre suivante apparaît :
Plusieurs types de capteurs prédéfinis sont déjà présent dans la liste de l’éditeur; ces capteurs sont proposés et installés avec Dewesoft. Vous pouvez en ajouter de nouveaux, les modifier ou les supprimer. Sur le côté supérieur droit de la fenêtre de l’éditeur, les icônes suivantes permettent d’effectuer ces commandes:
Renommer un capteur.
Ajouter un nouveau capteur - En cliquant sur le bouton ajouter, un nouveau capteur sera créer et nommé par défaut “Nouveau capteur”, mais vous pourrez le renommer.
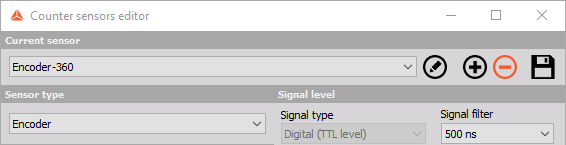
Supprimer le capteur - le bouton supprimer, retire le capteur actuellement sélectionné.
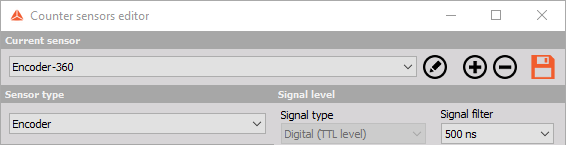
Enregistrer et quitter - le bouton enregistrer effectue une sauvegarde de la base de données capteurs compteurs puis ferme l’éditeur.
Quitter - Pour quitter proprement l’éditeur et enregistrer les données, assurez-vous d’utiliser l’icone Sauver & Quitter si vous avez apporté des modifications. Vous devez confirmer que vous souhaitez enregistrer les modifications lorsque vous quittez l’éditeur.
Dans la fenêtre de l’éditeur, vous pouvez choisir n’importe quel capteur dejà disponible depuis la liste déroulante. Vous pourrez ainsi visualiser ses caractéristiques et l’éditer.
Les paramètres et les valeurs saisies pour les capteurs compteurs sont divisés dans les sections suivantes:
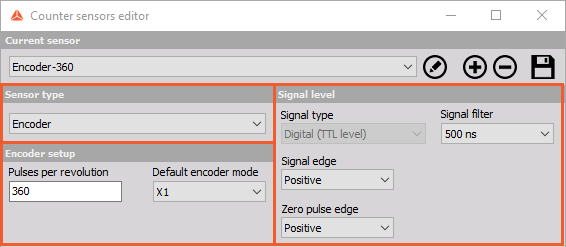
- Type de capteur
- Seuil du signal
- Paramètres encodeur ou paramètres roue dentées (suivant le type de capteur sélectionné)
Type de capteur
Il existe plusieurs types de capteurs disponibles. Ils sont à sélectionner à partir de la liste déroulante:
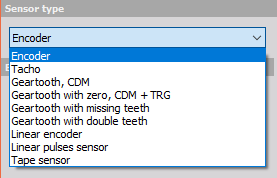
- Encodeur Classique, il propose des signaux A, B et Z. Le niveaux électrique du signal est souvent numérique, dit TTL (0-5V).
- Tacho - Capteur avec une impulsion par tour. Le signal peut être de type analogique ou numérique.
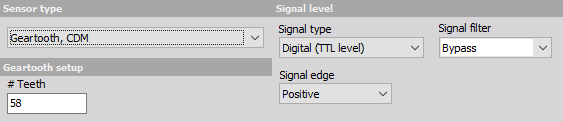
- Roue dentée, CDM - Capteur avec un nombre défini d’impulsions par tour, mais sans l’impulsion top tours (sans référence d’angle).
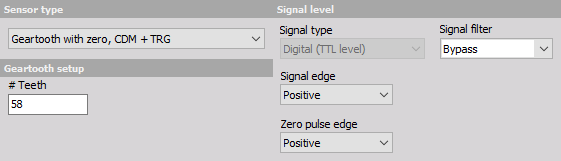
- Roue dentée avec zéro, CDM + TRG - Capteur avec un nombre défini d’impulsions par tour avec l’impulsion top tour (référence d’angle).
- Roue dentées avec dent manquante - Un classique dans le domaine automobile, nous définissons un nombre d’impulsions par tour. LLa dent manquante générera une impulsion manquante pour la référence d’angle. Un exemple type est le 36-1 capteur.
- Roue dentées avec deux dents manuantes - Un capteur avec nombre d’impulsions par tour avec une double dent manquante. Un exemple typique est la Geartooth de 60 dents, finallement constituée de 58 dents et trou équivalent à deux largeurs de dents manquante.
- Encodeur linéaire - Capteur de mesure de déplacement linéaire à partir d’un capteur de angulaire. un nombre d’impulsion par tour est à définir ainsi que la correspondant du nombre d’impulsions par unité de déplacement (millimètre, centimètre, mètre..).
- Capteur à impulsions linéaire. La mesure de déplacement depuis un d’impulsions par millimètre.
- Capteur à bande - capteur d’angle à partir d’un sticker que l’on colle sur le système tournant. un nombre de bande blanche réfléchissante et noir définissent la résolution du système tournant. le raccord se fait avec une largeure de noir supérieur à deux largeurs d’impulsion standards.
Seuil du signal
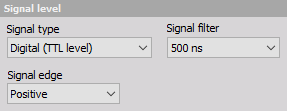
Il y a plusieurs paramètres possibles pour le réglage du seuil du signal. À partir de la liste déroulante, il peut être sélectionné:
Type de Signal
Les encodeurs ou roues dentées peuvent être défini comme numérique (niveau TTL) et, par conséquent, n’être utilisé qu’avec des entrées compteurs. D’autres capteurs type Tacho peuvent avoir des sortie de type analogique, pour ces capteurs, vous devez définir le niveau de déclenchement.
Filtre du Signal
Le paramètre filtre du signal filtre consiste en un filtre anti-rebond, utilisé pour prévenir les problèmes de sauts intempestifs sur le signal. Un signal doit être continu pendant un l’intervalle de temps défini avant que le logiciel accepte un changement d’état. Ce filtre ajoute également un retard sur la mesure des signaux!
Transition du signal
La transition du seuil du signal peut-être positif ou négatif.
Configuration d’un encodeur
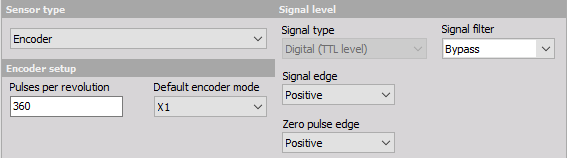
Pour configurer un encodeur pour effectuer une mesure, voici ce que vous devez définir:
- Le nombre d’impulsions par tours - les valeurs standard sont des multiples de 2 (256, 512,1024). Ces capteurs sont généralement utilisés comme l’horloge externe, de sorte que nous puissions des calcul de spectre direct sur un multiple du nombre de tours et de voir plus facilement les composantes harmoniques. D’autres valeurs sont possible mais généralement liées cette fois à une résolution en degrés (360, 720, 1800, 3600) afin d’optimiser la résolution d’angle.
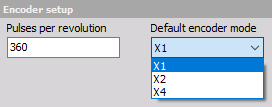
- Le mode encodeur par défaut. La description des modes de comptages pour les encodeur est décrite dans notre espace de formation WEB DEWESoft-PRO.
Pour un complément d’information sur les technologies de capteurs compteurs, visitez notre espace de formation PRO -> Dewesoft page Web -> Formation PRO -> Compteurs.
Configuration d’une roue dentée
Paramètres du capteur
Pour ces capteurs, nous avons besoin de définir le nombre d’impulsions par tour (nombre de dents).
Roue dentée avec zéro
Pour ces capteurs, nous avons besoin de définir le nombre d’impulsions par tour (nombre de dents). Dans le réglage de la voie compteur, il faudra préciser la voie pour détection de l’impulsion ZERO.
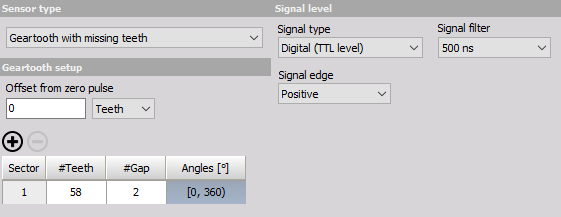
Roue denté avec des dents manquantes
Pour ces capteurs, nous définissons le nombre de dents (nombre de Dents) et la largeur du nombre de dents manquantes (#Gap). L’exemple dans l’image ci-dessous montre les paramètres d’un capteur 60-2. Si toutes les dents étaient là, il y en aurait 60. Mais deux d’entre elles sont manquantes pour créer une référence d’angle. Il y a donc seulement 58 dents existantes.
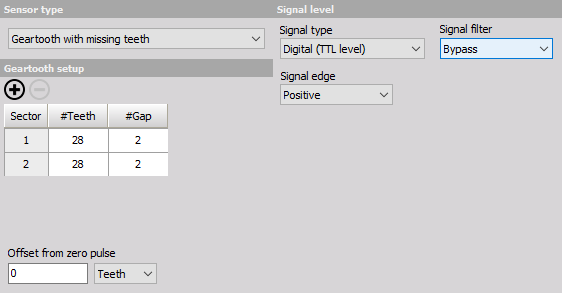
Si vous voulez configurer un capteur 60-2-2, vous avez besoin d’entrer 28-2-28-2, de sorte que la somme totale des nombres de dents doit être égale au véritable nombre de dents du capteur.
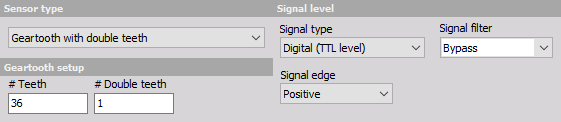
Geartooth avec double dents
Pour ces capteurs, nous définissons le nombre de dents et le nombre de doubles dents. L’exemple ci-dessous montre les paramètres de configuration d’un capteur 36+1, une roue dentées avec 36 dents et une double dent.