La théorie de l’équilibre
Équilibré rotors sont essentiels pour la plupart des types de machines tournantes. Déséquilibre pour créer des vibrations provoquant des défauts du matériel et de la réduction de la durée de vie d’un matériau. Dans la plupart des cas, le rotor déséquilibre est le problème majeur de la vibration, elle est liée à la première commande (= fréquence de rotation).
Nous supposons, que nous considérons que la soi-disant “rigide rotors”, ce qui est vrai pour presque tous les cas pratiques. Cela signifie que la vitesse de fonctionnement de la machine est inférieur à 70% de sa première fréquence de résonance. La fréquence de résonance est la vitesse critique, où les résonances de structure entraîner de fortes vibrations. À la résonance, la phase est en train de tourner rapidement, et il serait impossible de faire une mesure correcte.
REMARQUE: L’exigence en termes de fréquence d’échantillonnage dépend du premier ordre (par exemple, 3000 TR / min/60 = 50 Hz → requis taux d’échantillonnage ≥ 3520 Hz). Aussi, la précision du capteur de vibrations signal est obligatoire

NOTE: Le minimum de l’échantillon taux est calculé à partir de l’équilibrage de vitesse TR / min (Max TR / min + 10%) et le maximum de commande est sélectionnée dans les paramètres (32 est par défaut). (3000RPM / 60) * 1.1 * 2 * 32 = 3520 Hz.
L’objectif de l’équilibrage pour réduire les vibrations liées à la première commande. Fondamentalement, il fonctionne comme ceci: Nous mesurons l’état initial, puis nous ajoutons un essai de poids, de masse connue, le calcul de la position et de la masse du contrepoids, de supprimer le procès de poids et de mettre le poids calculé sur le côté opposé, à annuler le déséquilibre.
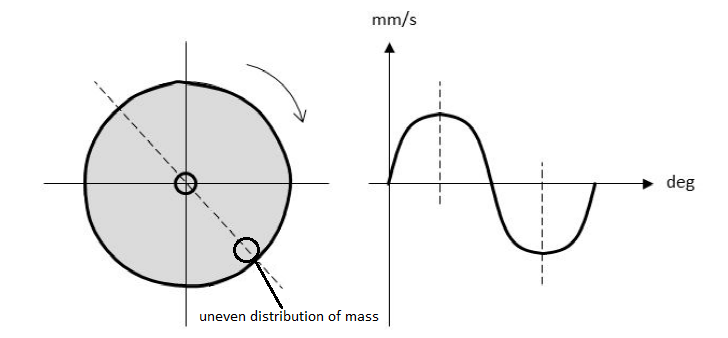
Lorsqu’un déséquilibre existe, la première commande (fréquence de rotation) peut être clairement vu. Comme illustré dans l’exemple ci-dessous, sur le rotor il existe une répartition inégale de la masse.
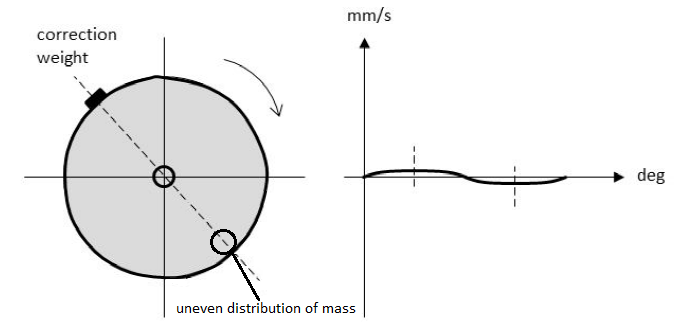
D’un poids de correction est ajoutée (ou le matériel est enlevé) sur le côté opposé, ce qui annule la partie la plus importante. Cette procédure peut être répétée jusqu’à satisfaction.
Simple et double plan de l’équilibrage
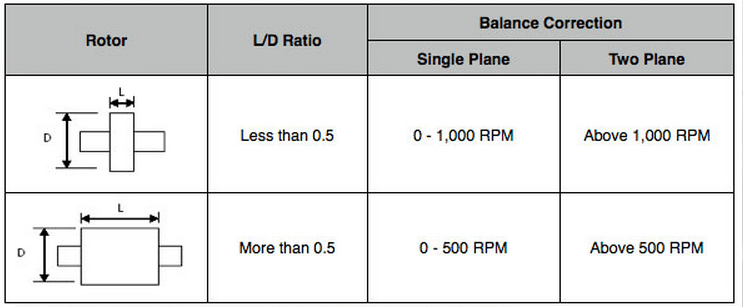
Selon les machines, simple ou double plan de l’équilibrage est utilisé. La sélection d’un avion ou deux plan d’équilibrage en général dépend de deux facteurs. L’un des facteurs est le rapport de la longueur du rotor (L) diamètre du rotor (D). L’autre facteur est la vitesse de fonctionnement du rotor. Comme une règle générale, nous pouvons nous référer au tableau ci-dessous.
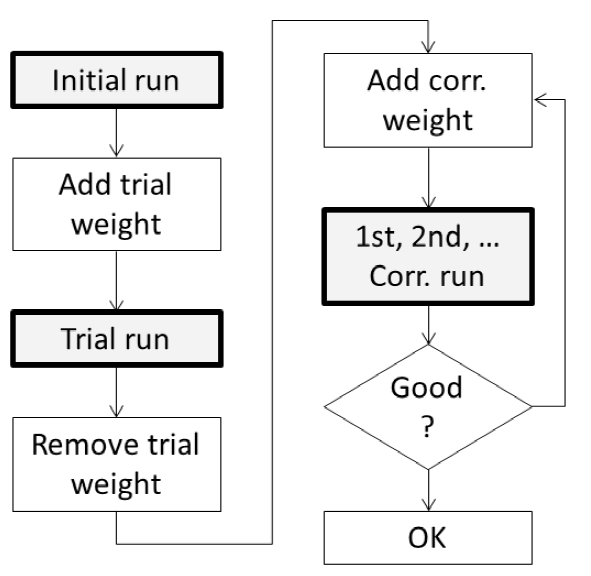
La procédure pour un plan unique ou double plan de l’équilibrage seront différentes, en fonction de l’option choisie. Mais, fondamentalement, les étapes suivantes doivent être prises:
- exécution initiale
- essai
- correction de course(s)
Étape-par-étape de la procédure
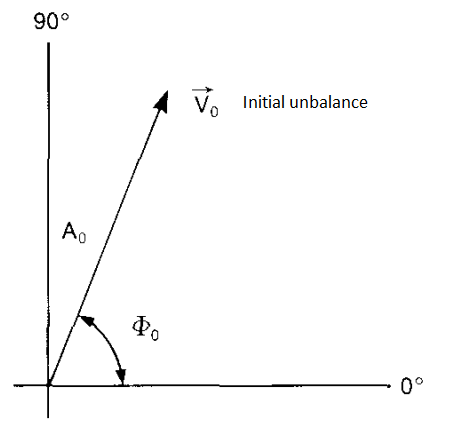
La première étape de la procédure d’équilibrage est de faire un premier run. La machine doit être exécuté à la vitesse de fonctionnement. La vitesse de vibration est détectée. Le niveau de la vitesse et de l’angle de phase de donner ensemble un vecteur qui représente l’origine de déséquilibre du rotor. La longueur du vecteur est égale à l’amplitude de la vibration et sa direction est donnée par l’angle de phase.
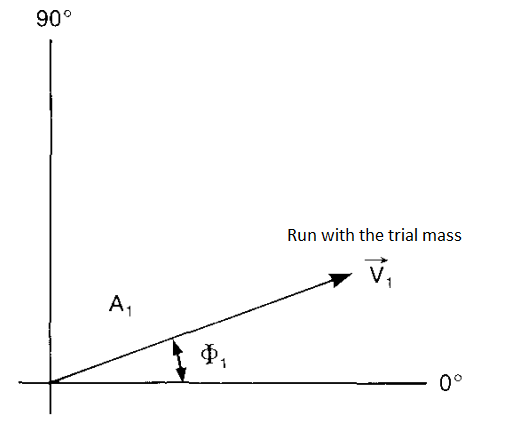
La deuxième étape consiste à ajouter un procès de masse. Un procès de masse a un poids connu et il est fixé à un rayon à un arbitraire de la position angulaire du rotor. La machine est à nouveau courir jusqu’à la vitesse d’exécution. Nous obtenons une nouvelle vibration niveau de la vitesse et un nouvel angle de phase. Ces valeurs représentent la résultante de l’effet du déséquilibre initial et le procès de masse.
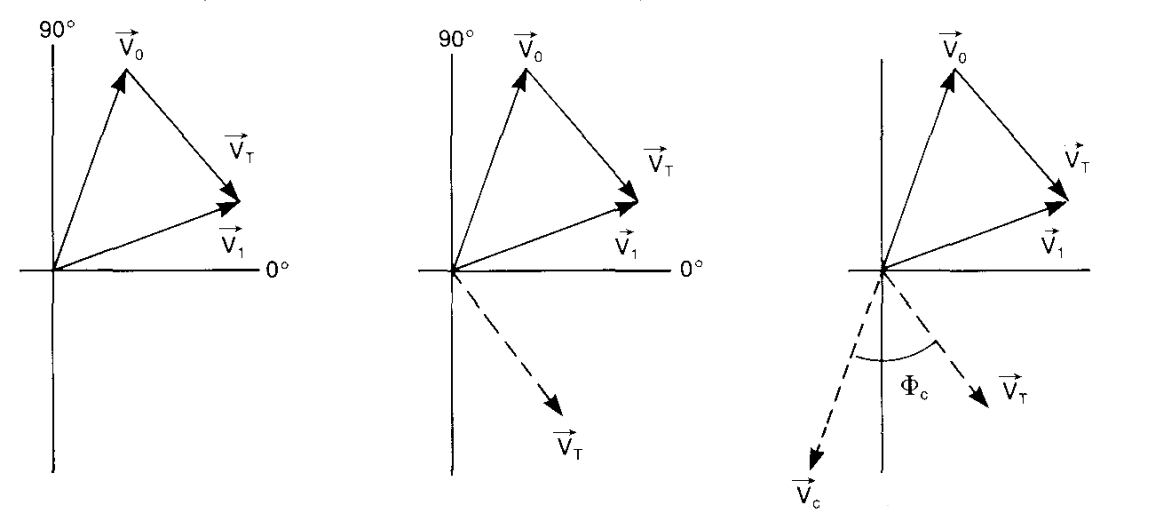
Les conseils de vecteurs V~0~ et V~1~ sont reliés entre eux par de la troisième vecteur V~T~, qui est marqué de façon à indiquer le V~de\ 0~ à V~1~ direction. Ce vecteur représente l’effet de l’essai de la masse. Un vecteur est tracé parallèle au vecteur V~T~, avec la même amplitude et la direction, mais à partir de l’origine.
Dans la direction opposée à V~0~, il existe un vecteur V~C~ et il représente la position et la grandeur de la masse nécessaire pour contrer l’origine de déséquilibre.
Si l’on suppose que l’amplitude de la vibration est proportionnelle au déséquilibre de masse, nous obtenons l’expression qui nous permet de trouver la valeur de compensation de la masse (M~COMP~).
\ \$\$ \frac{M_\text{T}}{\vec{v_\text{T}}} = \frac{M_{\text{COMP}}}{\overrightarrow{v_{\text{COMP}}}} = \frac{M_0}{\vec{v_0}} \$\$\
\ \$\$ M_{\text{COMP}} = M_0 = \frac{\vec{v_0}}{\vec{v_T}} \cdot M_T \$\$\
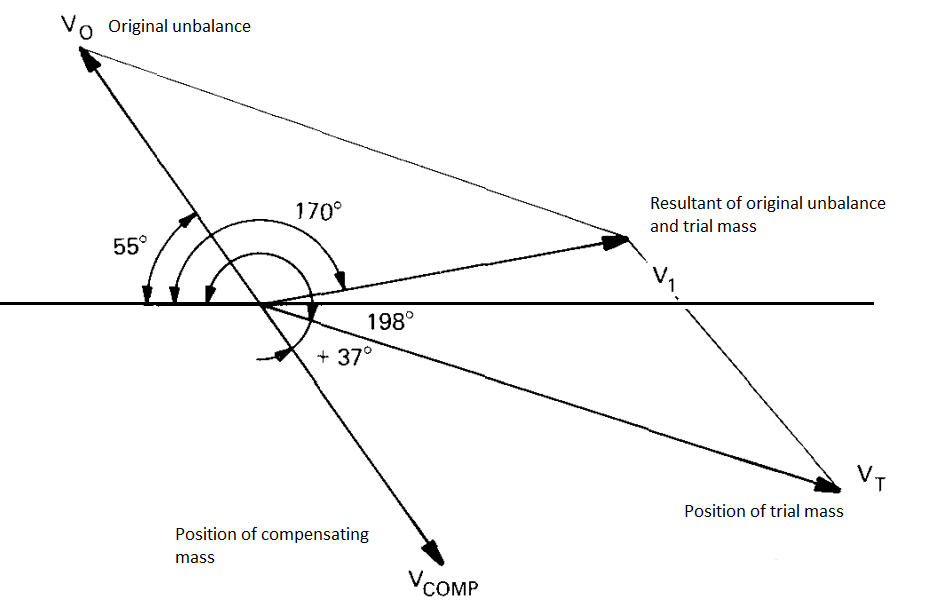
La position de la masse par rapport à la position du procès de masse peut être déterminée à partir du diagramme vectoriel.
Nous avons maintenant suffisamment d’informations pour que le diagramme vectoriel avec vecteur de longueur proportionnelle à la valeur mesurée de la vitesse de vibration des niveaux.
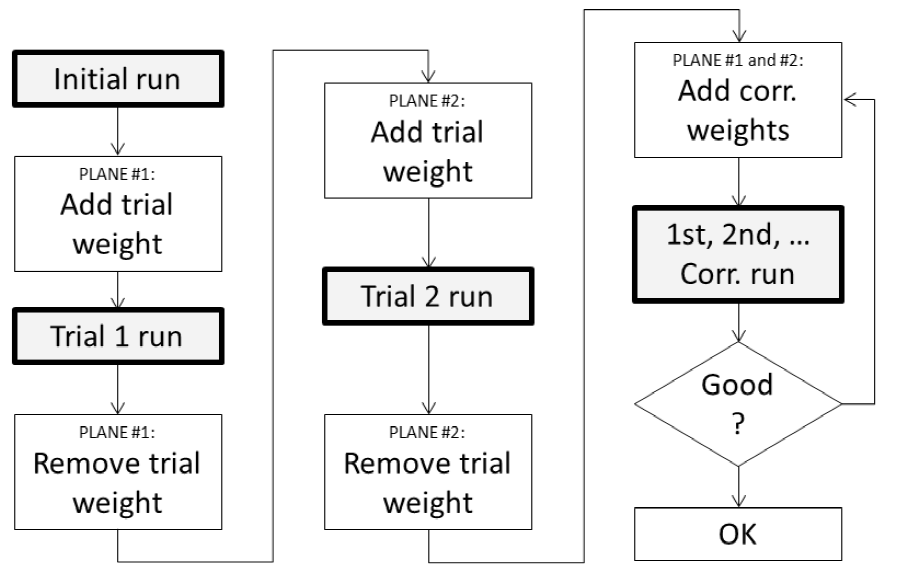
La procédure en DEWESoft est guidé par le contrôle visuel de l’instrument. Les diagrammes ci-dessous montrent les routines pour simple et double plan de l’équilibrage. Au lieu d’ajouter la correction de poids vous pouvez également retirer de la matière à l’opposé de la position (angle + 180°).
Plan unique d’équilibrage de la procédure
Double plan de l’équilibrage de la procédure
En ajoutant la correction des poids pour les deux plans en même temps, nous enregistrons une étape supplémentaire.