Capteur d’angle
Lorsque vous appuyez sur le bouton Config. d’une fonction mathématique capteur d’angle la fenêtre suivante s’ouvre :
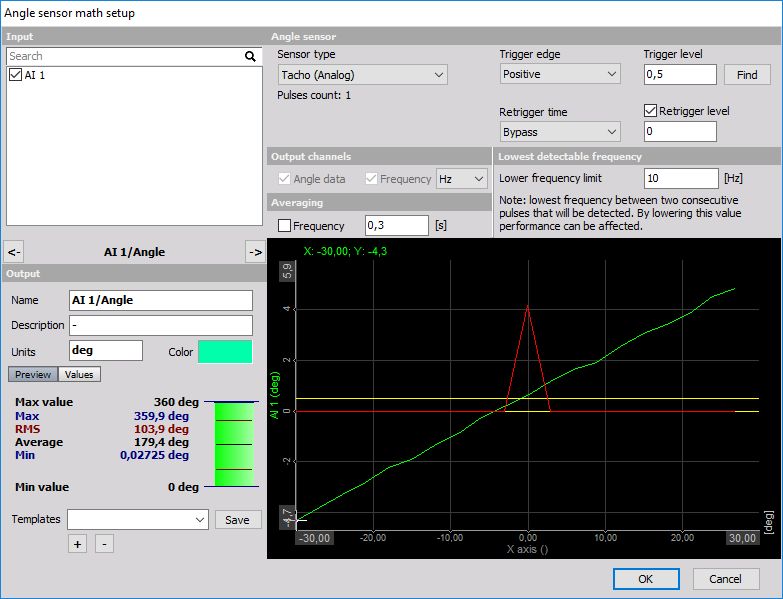
Pour des informations détaillées sur les réglages de base des voies d’entrée et de sortie voir -> écran de Configuration et de fonctionnement de base.
L’entrée pour le capteur d’angle peut être n’importe quel signal analogique déclenchement (comme une tacho - 1 fois par révolution ou un capteur dédié automobile type 60-2). Dans les deux cas, vous avez besoin des mathématiques pour calculer l’angle et de la fréquence du signal entrant. Dans les deux cas, le signal doit être connecté à l’entrée analogique du système d’acquisition. Ensuite, vous avez besoin de sélectionner ce signal, de sélectionner le type de capteur à partir de la liste des capteurs pré-enregistrés ou de définir un nouveau type de capteur. Ensuite, il suffit d’appuyer sur le bouton Trouver afin de déterminer les niveaux de déclenchement. Dans la plupart des cas, cette fonction marche déjà, mais dans certains cas, vous aurez besoin de définir les niveaux de déclenchement manuellement à partir des paramètres Seuil trigger et Niv. de retrigger. Ensuite, vous pouvez définir le Tps de réarmement. C’est un délai dans lequel le signal n’est pas vérifié pour les triggers. C’est utile pour éviter de déclenchements inopinés. Le graphique ci-dessus montre les niveaux d’un signal avec une détermination aisée si les triggers fonctionnent bien.
La sortie de cette fonction mathématique est le:
- Angle: la voie angle comme nous pouvez le voir sur l’image ci-dessous et la voie trigger
- Fréquence: la voie fréquence
Ces voies peuvent être sélectionnés en vérifiant la boîte appropriée dans la section des Sortie.
Cet angle peut être utilisé dans à peu près tous les modules avancés de Dewesoft comme l’analyse de combustion, le suivi d’ordre et les vibrations de torsion ou de façon autonome, juste pour obtenir la fréquence du signal.
La fonctionnalité intéressante de ce module est qu’il met en œuvre le calcul de retard. Pour un capteur comme le 60-2 il n’est pas possible de déterminer l’angle tant que le premier écart ne soit constaté. Pendant ce temps, le fonction mathématique capteur d’angle organise tous les calculs et avec le premier écart calcule également les données pour le premier tour avant de l’espace. Ceci est crucial pour certaines applications comme le démarrage à froid du moteur.
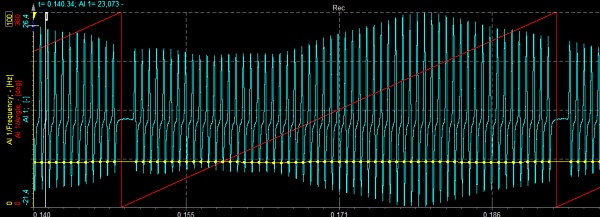
Ayez conscience que la qualité et la résolution des données dépendent de la fréquence d’échantillonnage. Si la fréquence d’échantillonnage est faible, les sorties (en particulier la fréquence du signal) ne seront pas exactes. Il est donc recommandé d’utiliser une fréquence d’échantillonnage élevée (50 kHz) pour ces calculs. Les résultats peuvent être améliorés en utilisant un Moyennage pour la Fréquence, ces réglages sont accessibles dans l’écran de configuration. Ceci moyennera les résultats sur la fréquence dans la période de temps définie.