General information
The KiRoad module enables DewesoftX to acquire data from the Kistler KiRoad Performance measurement system.
There are four operation modes: a) When there is no Dewesoft hardware: KiRoad is running as stand-alone. b) Master clock: KiRoad acts as clock provider for Dewesoft hardware. c) Soft sync: KiRoad and Dewesoft hardware each run with their own internal clock.
License
The KiRoad modules require additional license option, for full functionality. The user can also test the plugin with the one-month trial license.
Please follow the license link, where you will find the instructions how to add the license inside DewesoftX software.
Enable plug-in / Extension
KiRoad module is device plugin and therefore is added as any other of such plugins. Please follow the link to the instructions how to add the device plugin inside DewesoftX HW settings.
Hardware plugin
The sensors are connected to the measurement PC (e.g. S-BOX) via the LAN port (TCP/IP for data transfer). The clock and trigger lines of the sensor are connected to the corresponding clock and trigger pins of the sync connector on the DEWE-43 or SIRIUS measurement slice. If more than one KiRoad system is connected, it is recommended to use an Ethernet Switch. Clock and trigger are daisy-chained between KiRoad systems.

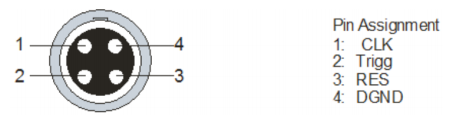
Sync connector
KiRoad synchronization wires (clock and trigger) must be connected to Sync connector of the Dewesoft measurement device (i.e. SIRIUS, DEWE-43): The clock output of the KiRoad is connected to CLK (Pin 1) on the Dewesoft Sync connector. The trigger output of KiRoad is connected to Trigger (Pin 2) on the Dewesoft Sync connector. The ground is connected to GND (Pin 4) of the Dewesoft Sync connector.
Ethernet configuration
KiRoad is connected to the measurement unit via ethernet cable for data exchange. To establish communication between KiRoad and the measurement system, the ethernet interface on the PC and the ethernet interface/s on KiRoad/s must be configured to use the same IP address range (i.e. the subnet mask must match).
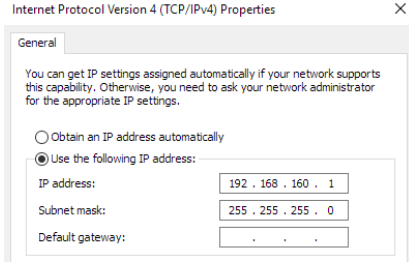
Configuration of the measurement units Ethernet interface:
- Define the IP address (here 192.168.160.1)
- Define the Subnet mask (here 255.255.255.0)
- Click OK to confirm the settings
Configuration of the sensors Ethernet interface:
Device can be configured two ways. First option is via Web browser (as described below) and the other (from KiRoad 4.0.0 version) you have a setup window in DewesoftX, so the use of additional software is not needed.
 NOTE: **For more information please refer to the Kistler KiRoad Performance quick start installation
guide.**
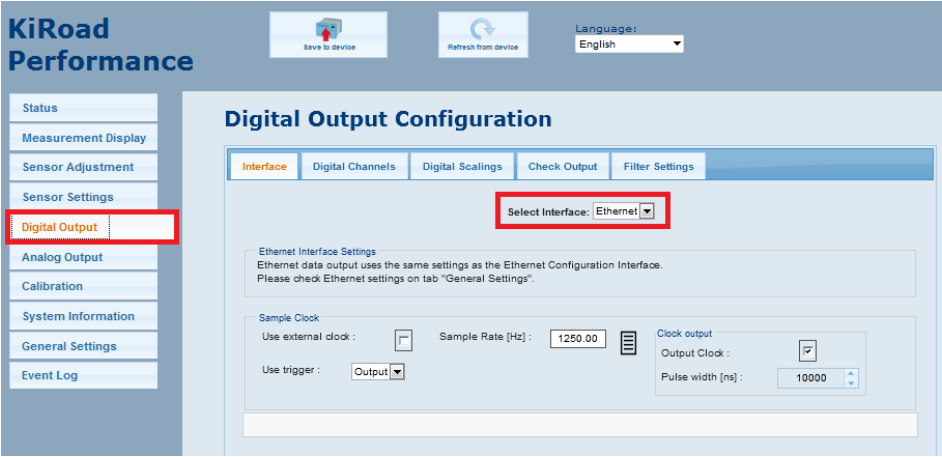
IMPORTANT:
KiRoad needs to be configured, to send data through the Ethernet data interface. In KiRoad configure interface (web or DewesoftX), go to Digital output settings and select interface Ethernet.
NOTE: **For more information please refer to the Kistler KiRoad Performance quick start installation
guide.**
IMPORTANT:
KiRoad needs to be configured, to send data through the Ethernet data interface. In KiRoad configure interface (web or DewesoftX), go to Digital output settings and select interface Ethernet.
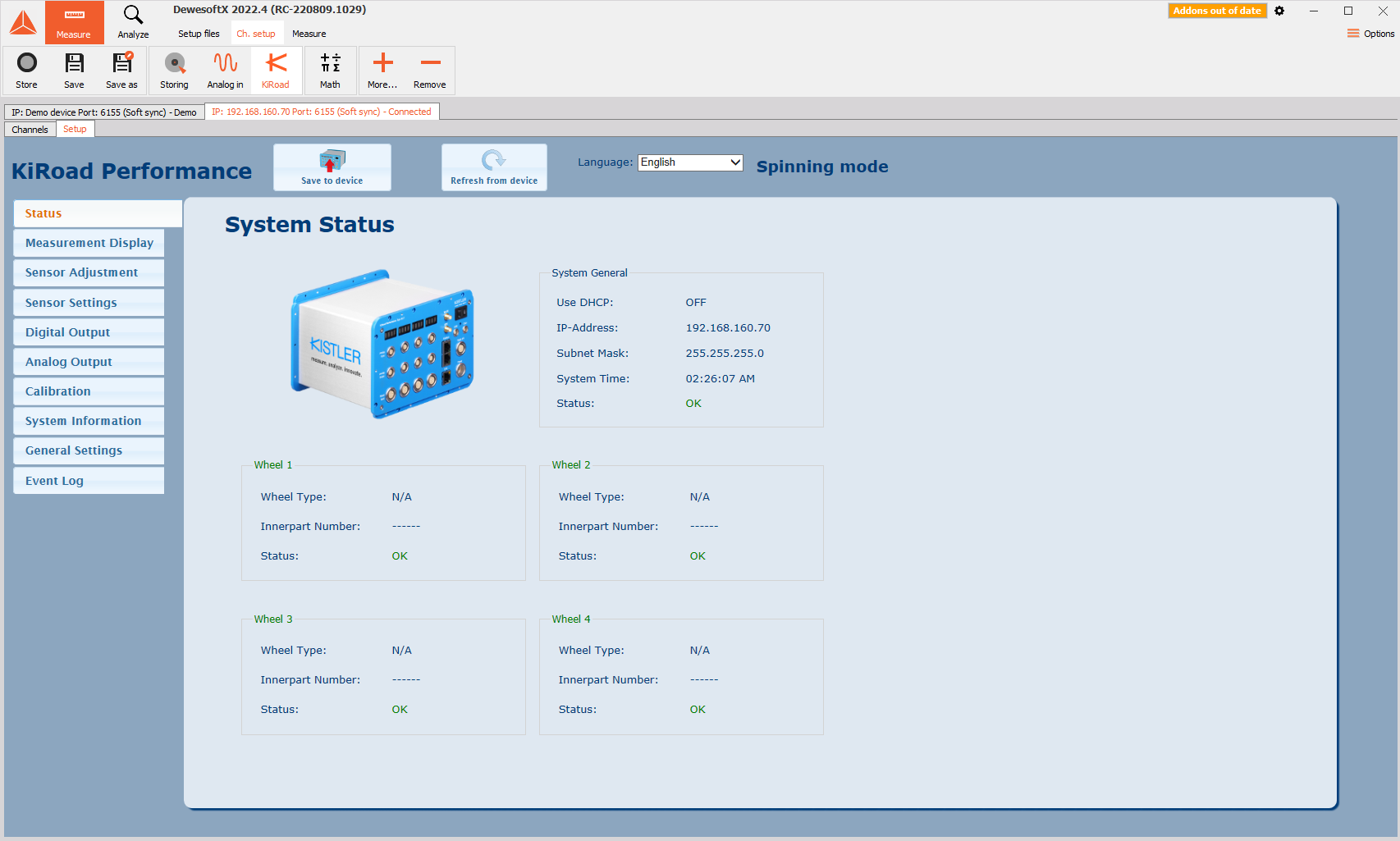
Configuration of the sensors Ethernet interface via web browser (Before version 4.0.0):
- Enter the IP address of your KiRoad Performance into the URL command line, for example 192.168.160.70. After an initialization screen (loader), the KiRoad Performance GUI will appear showing the System Status window.
- The KiRoad Performance GUI is optimized for the Google Chrome web browser.

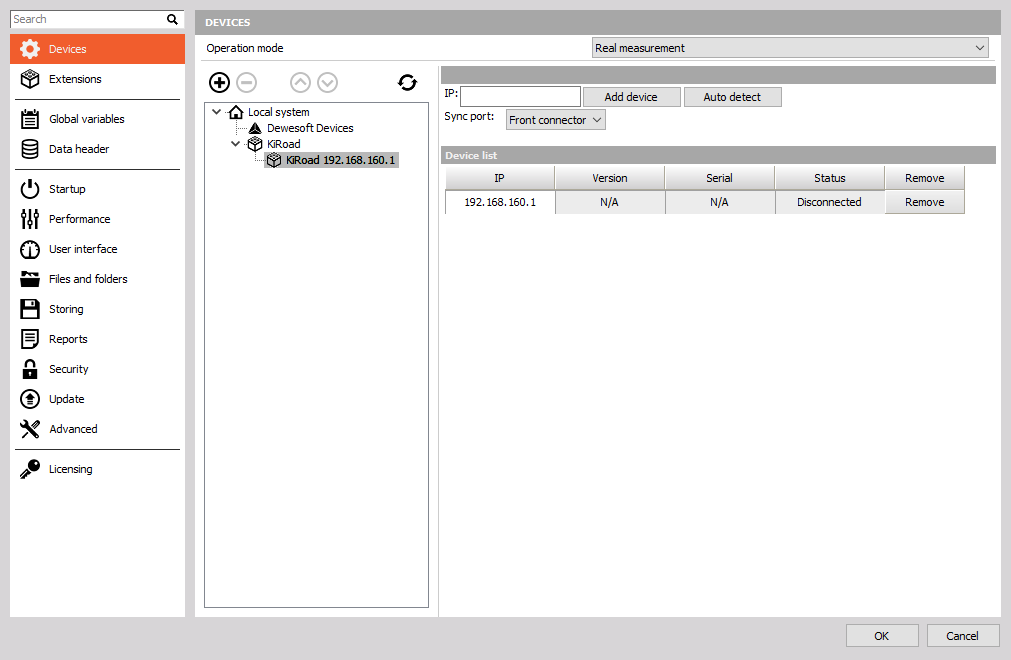
Hardware setup
After you have installed and enabled the plugin, start DEWESoft® and go to the Hardware Setup,
KiRoad Performance plugin has to be added as a device (from version 4.0.0)
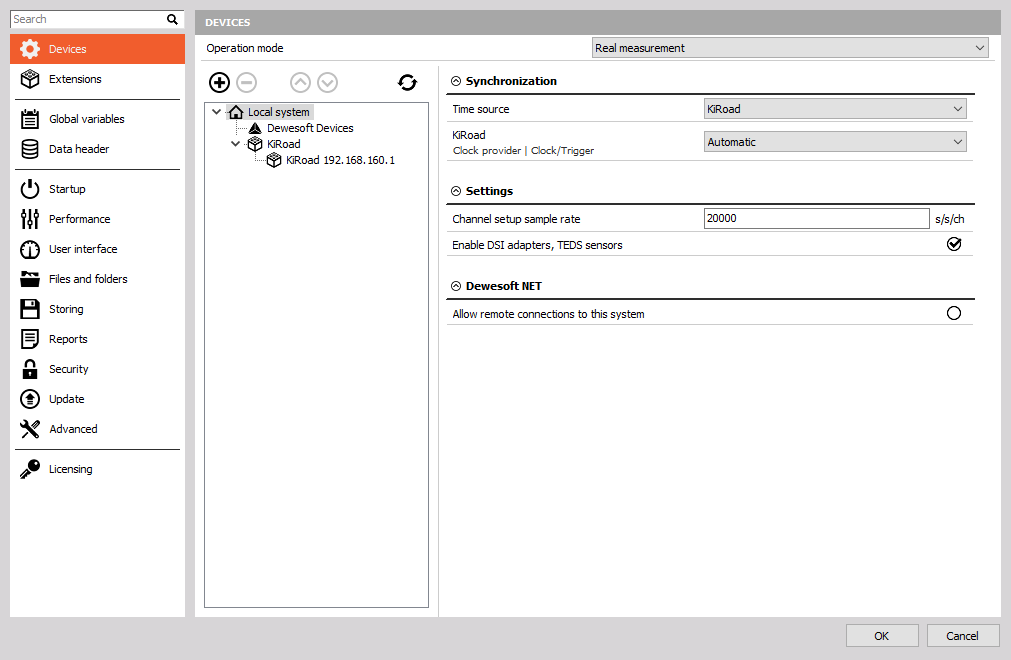
KiRoad as clock source
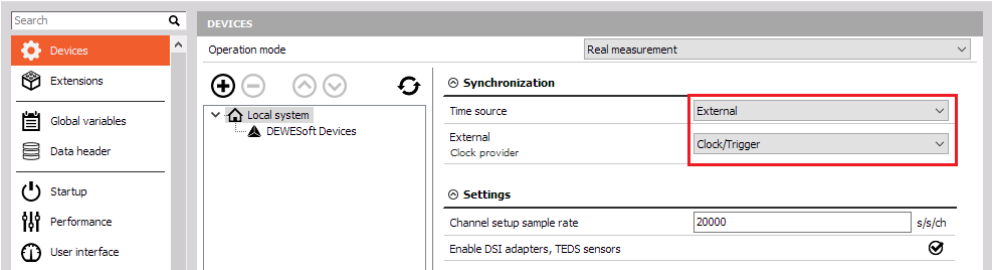
In clock source mode, KiRoad system acts as the clock source, providing clock and trigger for DEWESoft® measurement units. In clock source mode it is important to set the DEWESoft® synchronization settings to External – Clock/Trigger:
From 4.0.0 version:
Till version 4.0.0:
Soft sync mode
KiRoad can also be used without hardware synchronisation between devices. In this case synchronized data cannot be guaranteed and will be in the in the range of: * EtherCAT device: 4 ms * USB device (+ EtherCAT): 1 ms
Channel setup
In the channel setup of the Kistler KiRoad plugin, you can activate/deactivate channels of the connected sensors.
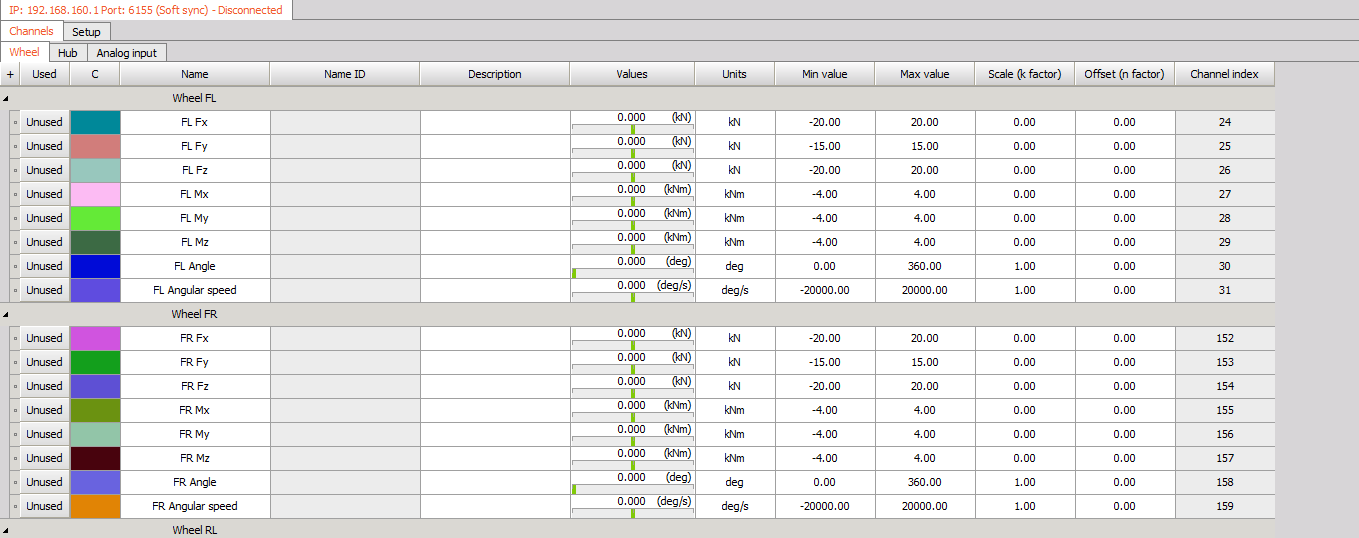
- Dynamic acquisition rate: This is the sample rate and can be chosen between 100 Hz and 1250 Hz. Please note that the set sample rate will be valid after switching to measurement mode (e.g. overview).
- IP:192.168.xxx.xxx: If more than one KiRoad system is connected, you can switch between the channel lists of each system.
- Channel list: The channel list of each system is divided into sub-groups (Wheel channels, Hub channels and Analog input) for easier navigation. It is possible to alter each channels name, colour, unit and scaling directly in the channel list.
- Load setting from device – channel properties (unit, min and max value) can be read from the device.