Synchronization
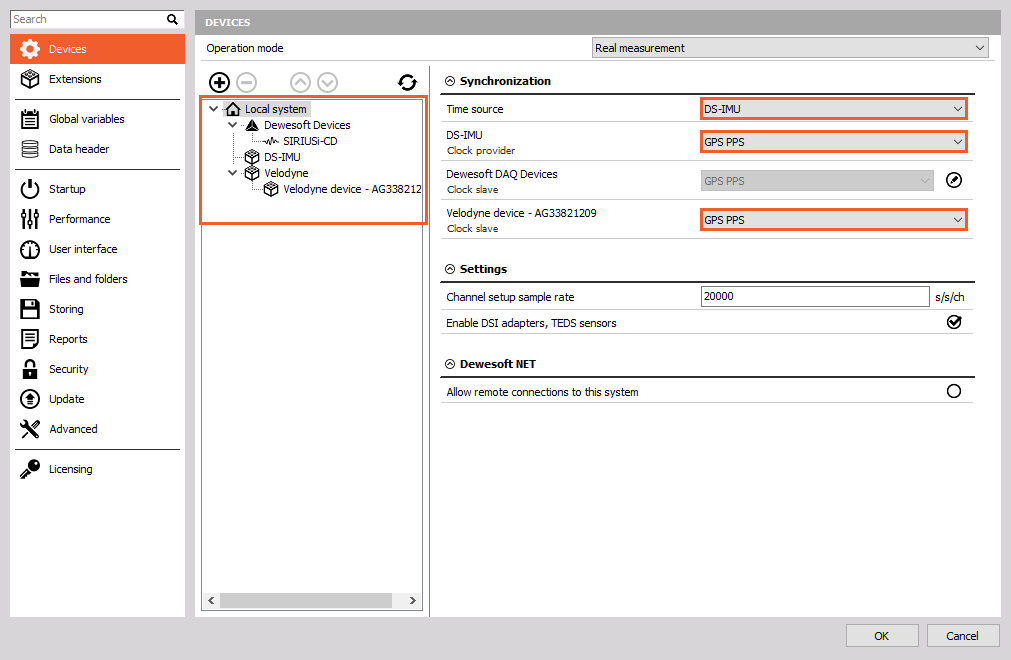
Synchronization can be set under the Local system inside DewesoftX settings. LIDAR sensors can obtain Software synchronization or GPS PPS synchronization.
Software synchronization
LIDAR can obtain software synchronization when it is used as a standalone device, and also when it is use togerher with other devices. The software synchronization accuracy is around 2-10 ms and this synchronization solution requires no additional hardware.
GPS PPS synchronization
Velodyne can be synchronized with other GNSS devices (DS-IMU, DS-VGPS-HS, …) with a PPS signal, where GNSS receiver is the source of the NMEA messages for the LIDAR sensor. In order to obtain PPS synchronization for Velodyne LIDAR, it needs to be physically connected to the GNSS device. See the Hardware connection section for more information.
Synchronization settings have to be adjusted as well. This can be done in DewesoftX settings under Local system first.
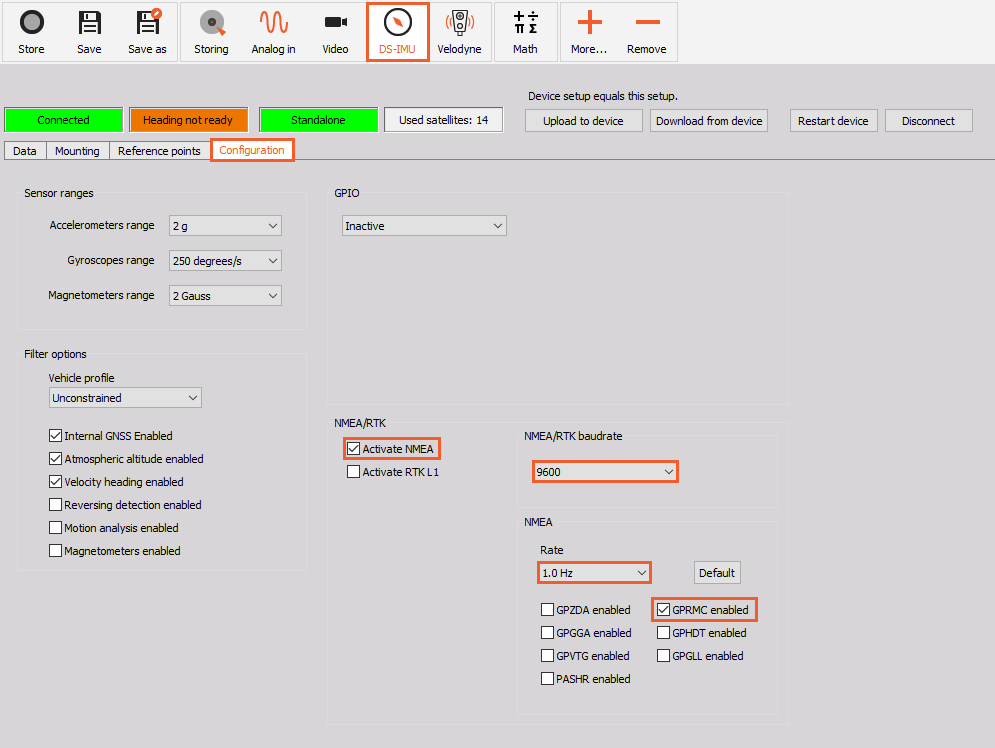
Then the NMEA transmit has to be enabled in DS-IMU settings (Channel setup) as well:
- Enable Activate NMEA option
- Set baudrate 9600
- Set NMEA rate on 1Hz
Enable GPRMC option
Hardware connection for GPS PPS
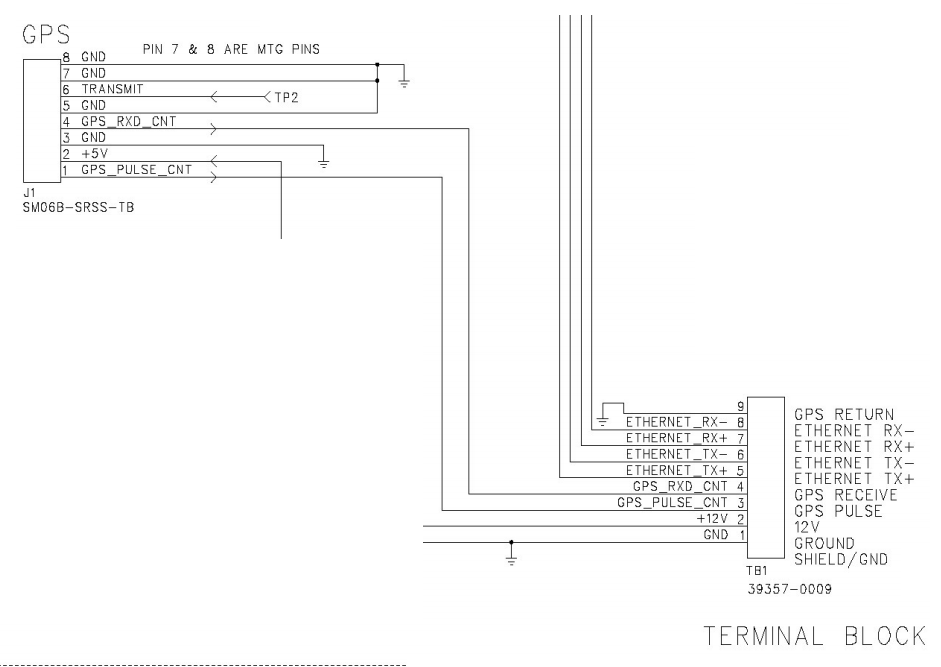
In order to use GPS PPS synchronization and positioning information, proper cabling connection needs to be obtained between GNSS and LIDAR devices.
The following connections between LIDAR’s GPS connector (SM06B-SRSS-TB) and DS-IMU2 cable (DB9) have to be created:
- DB9 pin 4 to SM06B pin 1 (PPS pulse)
- DB9 pin 2 to SM06B pin 4 (NMEA)
- DB9 pin 5 to SM06B pin 3 (GND)
LIDAR connector pin-out:
DS-IMU2 cable (DB9) pin-out:
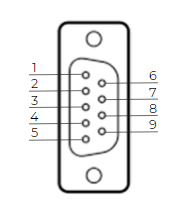
| DS-IMU2 DB9 pins | Description |
|---|---|
| 1 | +5V (USB) |
| 2 | TX AUX |
| 3 | RX AUX |
| 4 | PPS TTL |
| 5 | GNS |
| 6 | PPS RADIO |
| 7 | Not connected |
| 8 | GPI01 FLT |
| 9 | +15V (Ext power) |