Performance
In this section, you can adjust performance settings. There are sorted into three categories:
You can use the Performance monitor to check if any settings need to be adjusted.
General
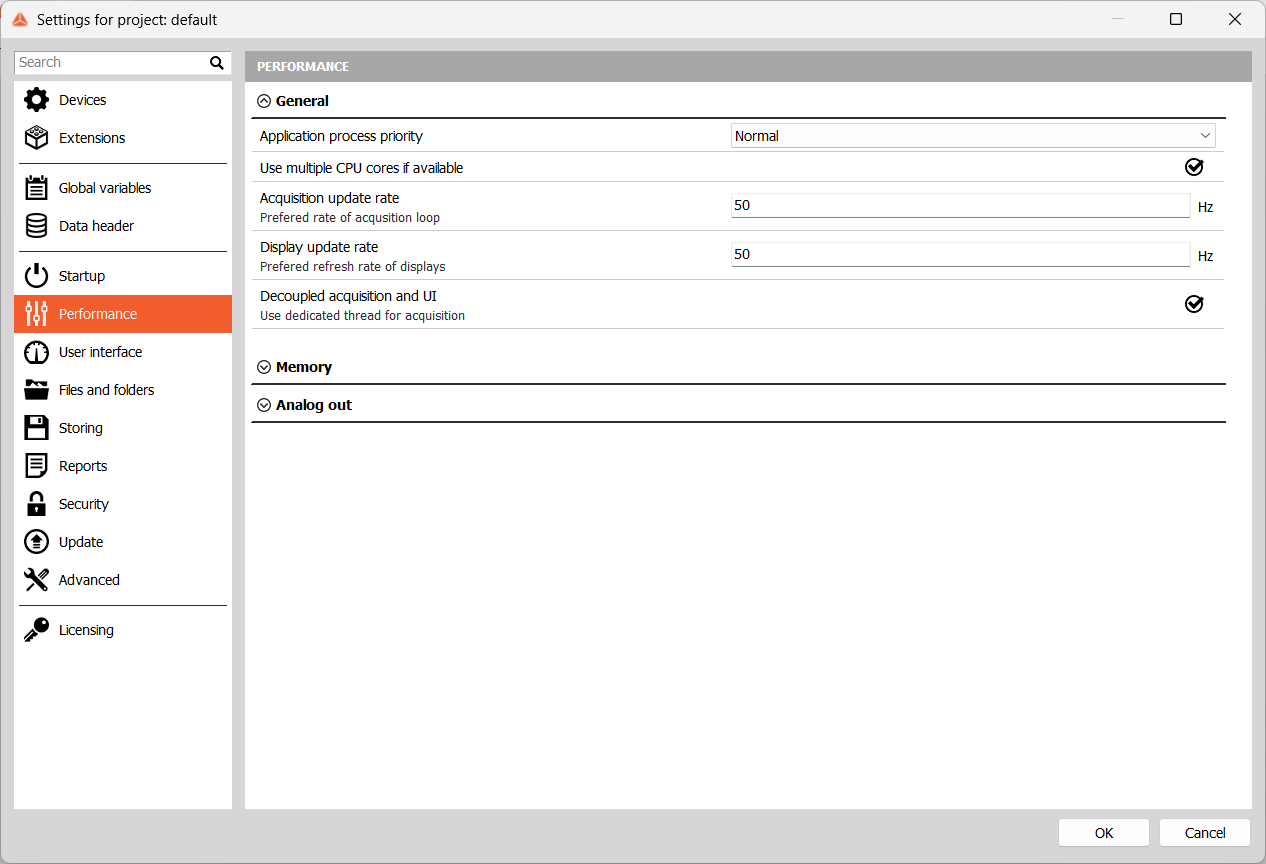
Application process priority defines which processes will be prioritized:

- Usually, Dewesoft should run on its own in the OS and Normal priority is enough.
- High priority allows DewesoftX to increase its performance if other processes are also running.
Real time is only useful in special applications. It might stall low-level acquisition drivers which must have enough CPU time. Setting DewesoftX to real time would mean that tasks like displaying data on the screen would have high priority.
Use multiple cores splits data acquisition and math processing between different CPU cores.
- Acquisition update rate defines the preferred rate of the acquisition loop. Set it higher if you want to have the faster reaction times. The acquisition loop can run up to 1000 Hz.
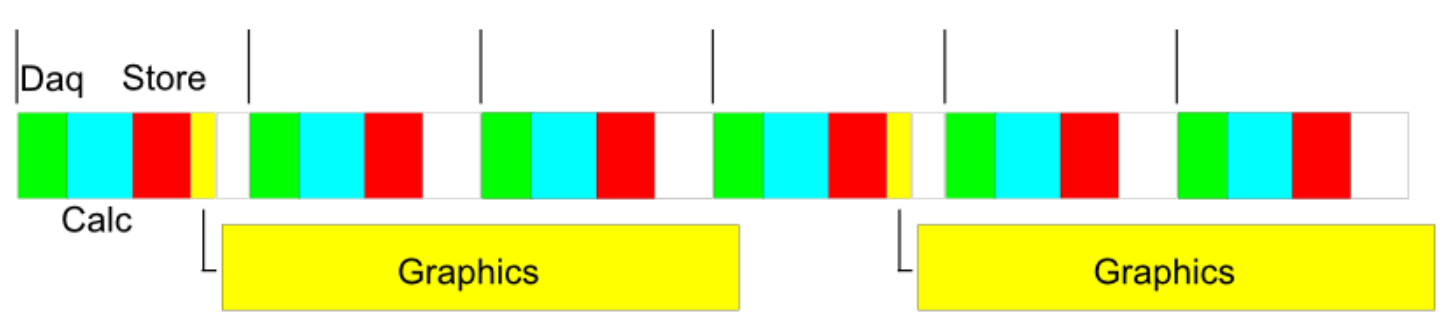
Graphics were a part of the acquisition loop before, which caused a slower performance. Now, they are done in parallel.
- Display update rate defines the preferred refresh rate of displays. By setting a lower display update rate, the CPU load of displays is lower.
For example, if we change the update rate from 50 Hz to 1 Hz, the CPU load of displays drops from 30 % to 1 %.

- Decoupled acquisition and UI are enabled by default. This option will use a dedicated thread for acquisition. One core will be used for acquisition and one core will be used for user interface.
Memory
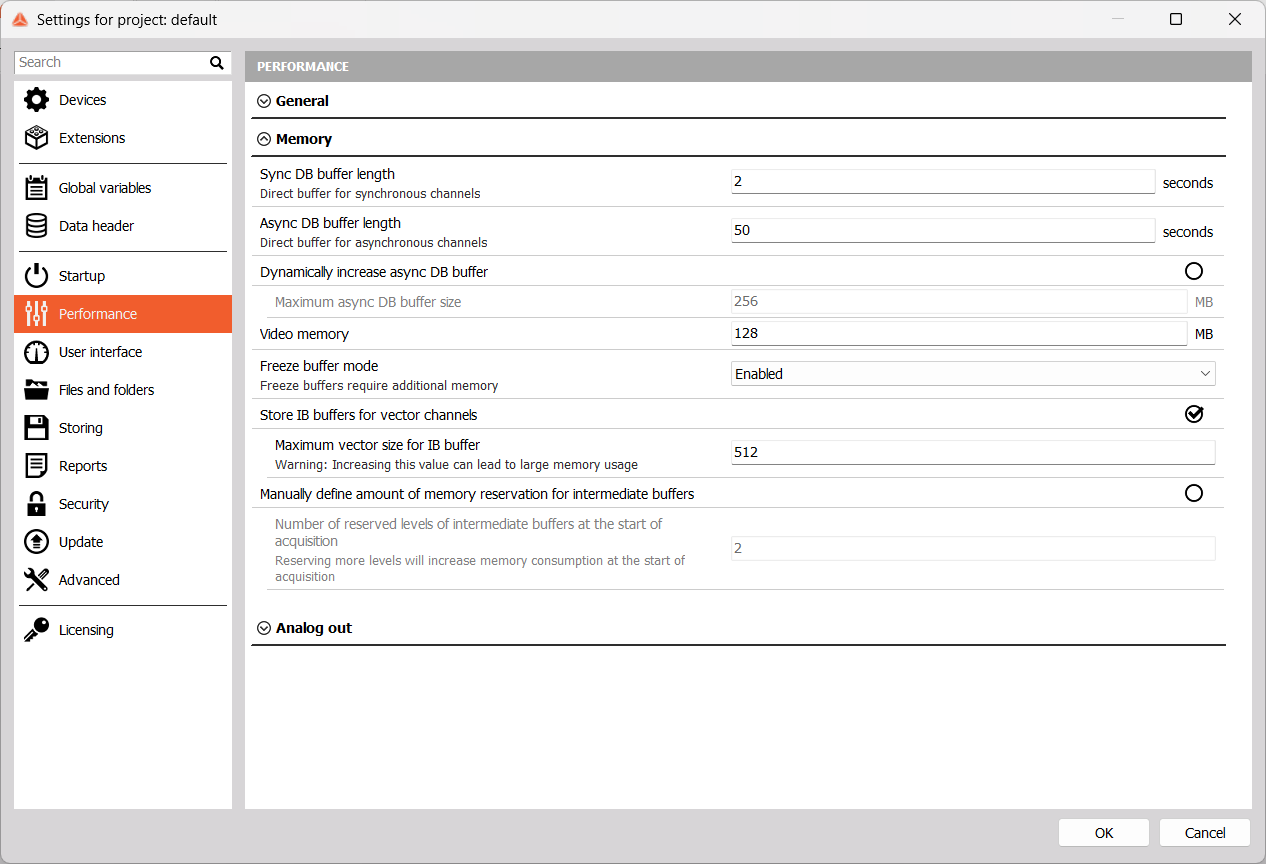
The following sizes need to be defined:
- Sync DB - Memory size in seconds for all synchronous channels (analog, counters, …). The value should be bigger than the maximum refresh time - 2 seconds is the default.
- Async DB - Memory size for all asynchronous channels (CAN, GPS,…). The default value is 50 seconds.
- Video Memory - Size of the video buffer. When using multiple cameras, the default 128 MB value should be reduced to half, to not run out of system memory.
Freeze buffer mode needs to be enabled in order to use Freeze mode.

When enabled, the Freeze button will appear in Measure mode.
You can also disable storing IB buffers for vector channels (enabled by default) and change the maximum vector size, as well as manually defining amount of memory reservation for intermediate buffers. Please note that increasing these values will increase memory usage.
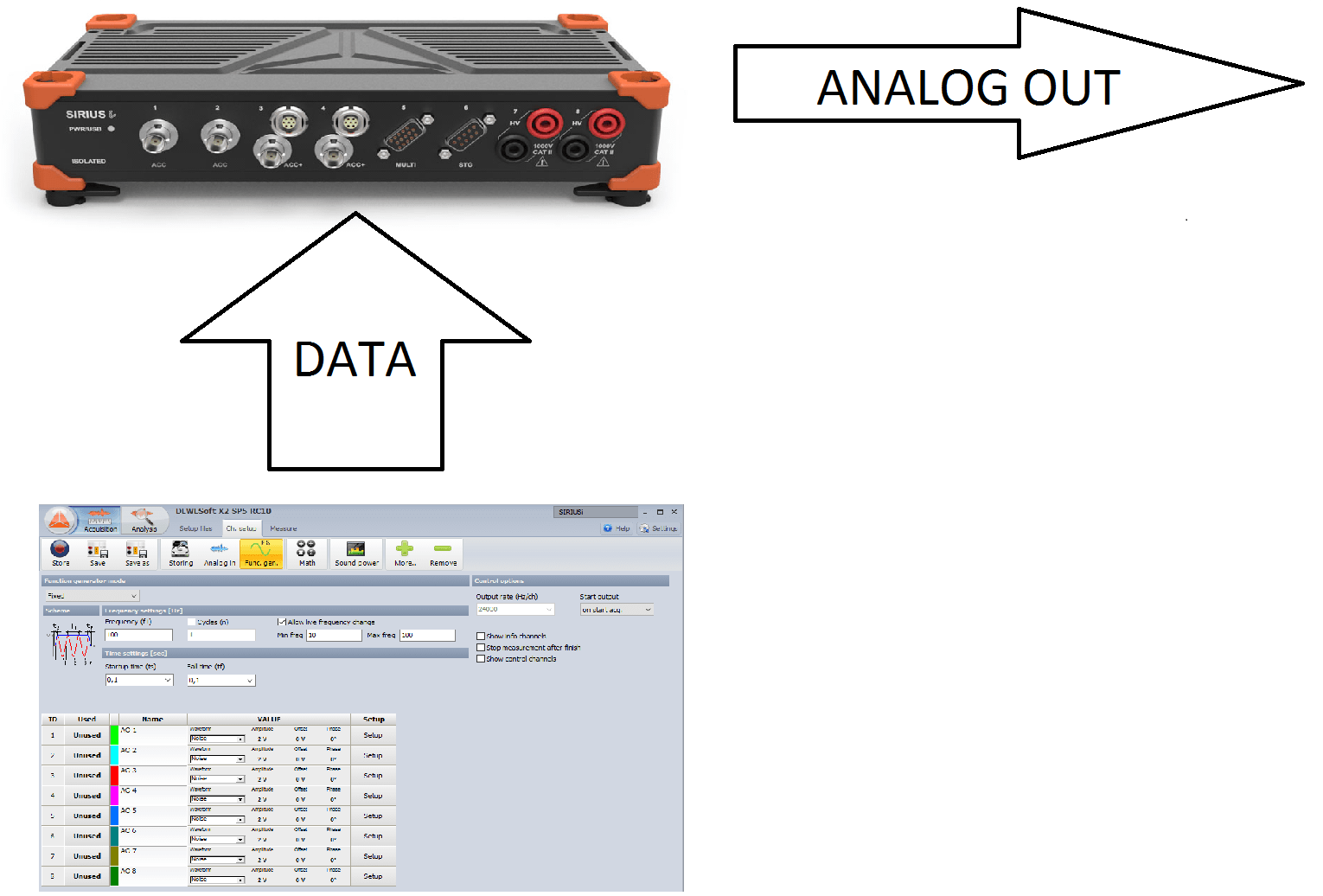
Analog Out
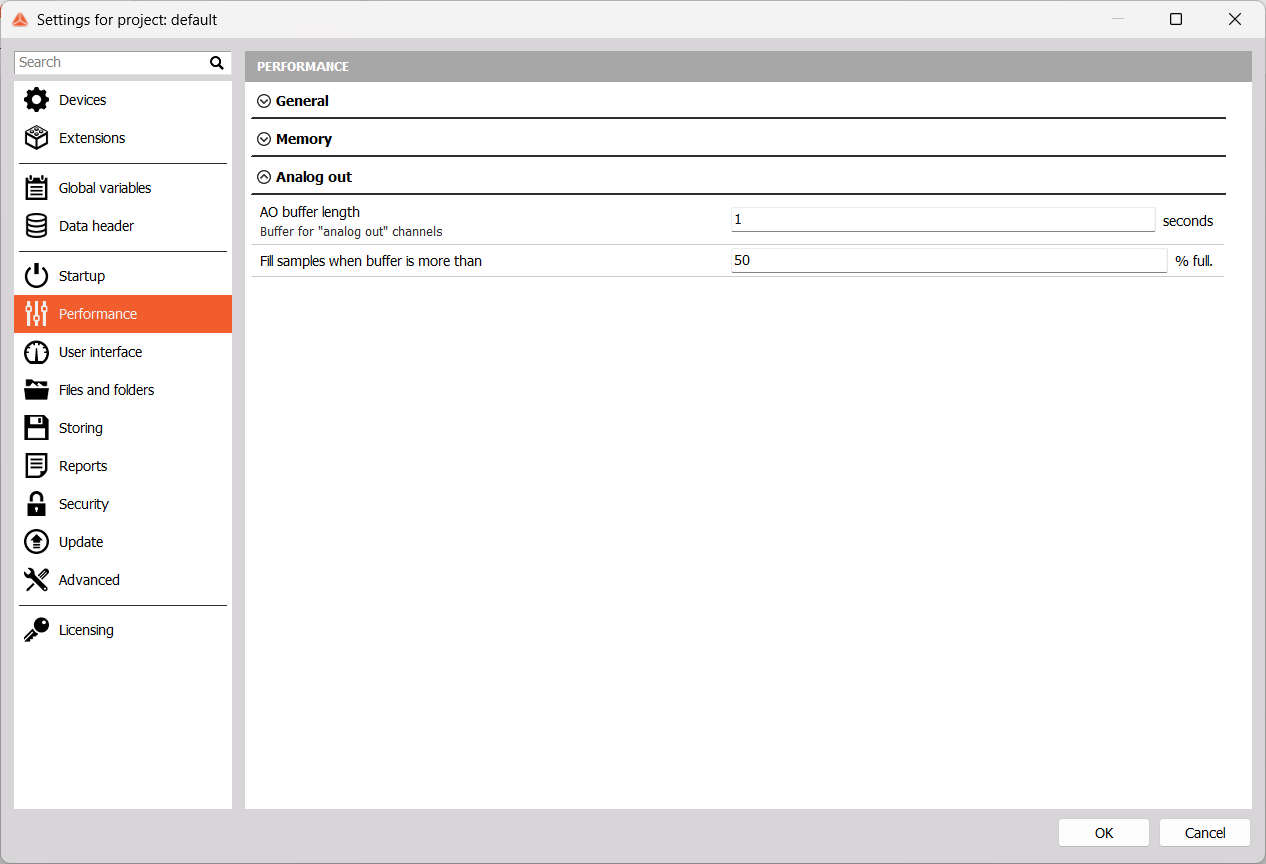
- AO buffer length - when you use the Function generator in DewesoftX, the software sends the data to your device. The device waits for the amount of AO buffer length before it starts to output the signal. This has to be done to prevent data loss. By default, the buffer length is set to 1 second.
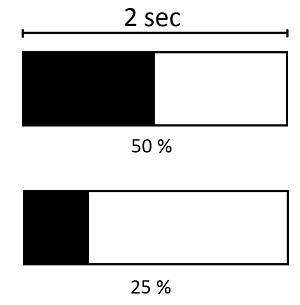
- Fill samples when the buffer is more than __ % full. - For example, with a 2-second buffer, data is transmitted when the buffer reaches a specific percentage threshold - 50% by default. The system waits for 1 second of data to accumulate before sending.